System for the estimation of track irregularities based on inertial sensors and computer vision
A new Track Geometry Measuring System (TGMS) was developed to be installed in railway vehicles for the estimation of lateral and vertical track irregularities. The TGMS includes a computer for data acquisition and process, a set of sensors including an inertial measuring unit (IMU, 3D gyroscope and 3D accelerometer), two video cameras and an encoder. The kinematic description, that is borrowed from the multibody dynamics analysis of railway vehicles used in computer simulation codes, is used to calculate the relative motion between the vehicle and the track, and also for the computer vision system and its calibration. The multibody framework is thus used to find the formulas that are needed to calculate the track irregularities (gauge, cross-level, alignment and vertical profile) as a function of sensor data. The TGMS has been experimentally tested in a 1:10 scaled vehicle and track specifically designed for this investigation. The geometric irregularities of a 90 m-scale track have been measured with an alternative and accurate method and the results are compared with the results of the TGMS. Results show a good agreement between both methods of calculation of the geometric irregularities.
Fig.1. Scaled instrumented vehicle with TGMS
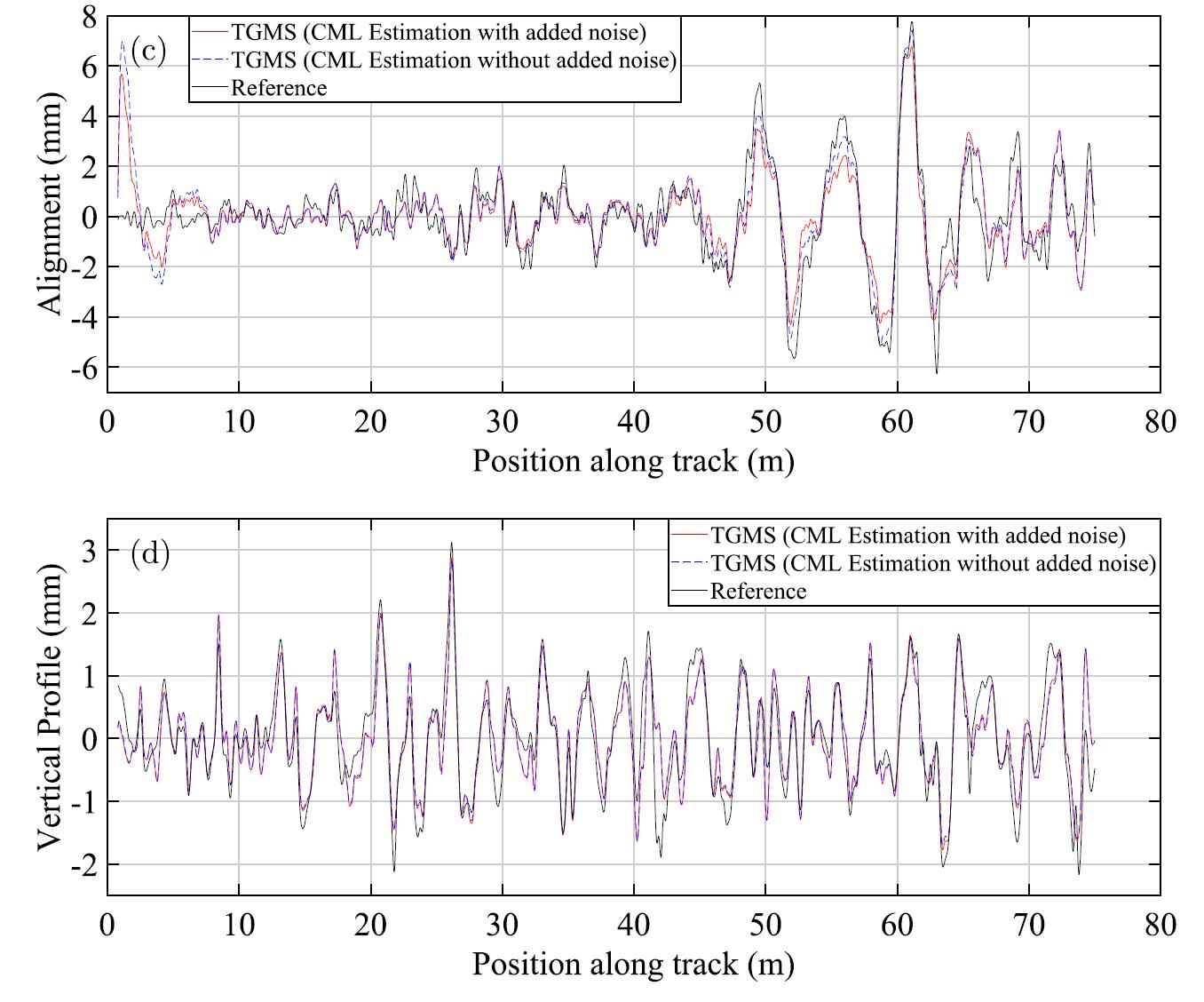
Fig.2. Estimation of track irregularities


A track geometry measuring system based on multibody kinematics, inertial sensors and computer vision (2021). Escalona, José L. ; Urda, Pedro; Muñoz, Sergio. Sensors.
Estimation of the trajectory and attitude of railway vehicles using inertial sensors with application to track geometry measurement (2023). González-Carbajal, J.; Urda, Pedro; Muñoz, Sergio; Escalona, José L. Vehicle System Dynamics.