The proposed system was developed for the estimation of lateral track irregularities from measurements from different sensors mounted on an in- service vehicle: a gyroscope to measure wheelset yaw angular velocity, two accelerometers to measure lateral acceleration of the wheelset and bogie frame, and an encoder to obtain forward velocity of the vehicle. The proposed methodology is based on the Kalman filtering technique, through the use of a highly simplified linear dynamic model of a bogie, capable of capturing the most relevant lateral dynamic behaviour of the entire vehicle. The simplified dynamic model (SM) is based on a vehicle running at variable forward velocity on a track, which comprises straight, curve and transition sections. Finally, the proposed methodology has been experimentally validated through an experimental campaign carried out in a 90 m 1:10 scaled track facility at the University of Seville and an instrumented scaled vehicle. The results of the estimation of the lateral alignment are analysed in the space domain and in the space frequency domain, according to standards. These results are promising, showing a good performance for monitoring lateral alignment on straight and curve tracks, with a very low computational cost.
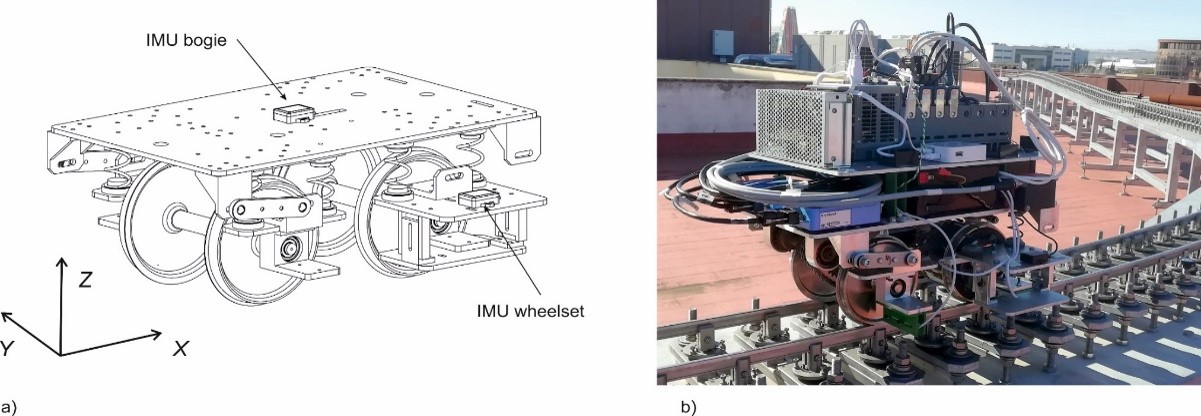
Fig.1. Scaled instrumented vehicle
Fig.2. Lateral alignment estimation

Estimation of lateral track irregularity through Kalman filtering techniques (2021). Muñoz, S. ; Ros, J.; Urda, P.; Escalona, J. L. IEEE Access. Vol 9.
Estimation of lateral track irregularity using a Kalman filter. Experimental validation (2021). Muñoz, Sergio ; Ros, Javier; Urda, Pedro; Escalona, José Luis. Journal of Sound and Vibration. Vol. 504.