CONCEPTOS BÁSICOS SOBRE
REDES NEURONALES
INDICE
Algunas
referencias históricas
Modelo de una
neurona artificial
Arquitectura
de redes neuronales
Modos de
operación: recuerdo y aprendizaje
Clasificación de los modelos de redes
neuronales artificiales
El Perceptrón
Simple (Rosenblatt, 1959)
Entrenamiento de un perceptron
RECONOCIMIENTO DE ROSTROS MEDIANTE UNA ARQUITECTURA BASADA EN REDES NEURONALES
RECONOCIMIENTO DE FIRMAS USANDO REDES NEURONALES MULTICAPA
RECONOCIMIENTO DE PATRONES
A PARTIR DE IMÁGENES AÉREAS
1.
Algunas Referencias Históricas.
[1943] McCulloch y Pitts propusieron modelos neuronales que implican
transiciones repentinas 0-1 y 1-0 en el estado de las neuronas. Estos
resultados sirvieron de base para el modelado de sistemas neuronales.
[1949] Hebb utilizó
modelos matemáticos para abordar el concepto del aprendizaje mediante el
refuerzo y la asociación.
[1957,1962] Rosenblatt
idea un tipo de sistemas denominados máquinas de aprendizaje (perceptrones) que ponían en práctica la teoría del
reconocimiento de patrones. Se demostró que al entrenar los perceptrones
usando conjuntos de entrenamiento linealmente separables se obtenía una
solución en un número finito de iteraciones que conseguía separar correctamente
las clases representadas por los patrones del conjunto de entrenamiento.
Las
expectativas se desvanecieron pronto ya que estos avances eran insuficientes
para la mayoría de las tareas de reconocimiento de patrones de significación
práctica.
[1965] Nilsson
resumió el estado de las investigaciones en el campo de las máquinas de
aprendizaje.
[1969] Minsky y Papert presentaron un análisis muy desalentador sobre la
limitación práctica de las máquinas de tipo perceptrón.
[1986] Rumelhart, Hinton y Williams desarrollaron
nuevos algoritmos de entrenamiento para perceptrones
multicapa. Para ello usaron el método conocido como regla delta generalizada para el aprendizaje por retropropagación.
Dicha regla se ha podida aplicar en algunos problemas de interés práctico. Por
este motivo, las máquinas de tipo perceptrón multicapa constituyen uno de los
principales modelos de redes neuronales en uso.
Si nos pidiesen calcular la raíz cuadrada de
5 con tres decimales de precisión y sin usar calculadora ni lápiz ni papel
diríamos que no somos capaces de realizarlo. Sin embargo, esta tarea es una
operación rutinaria y muy sencilla para un ordenador. No obstante, tareas como
coger una moneda al vuelo que lanzamos al aire o reconocer una cara en una
fotografía que son acciones cotidianas para nosotros son tareas realmente duras
para un ordenador. Es decir, tareas de reconocimiento de patrones, control de
dispositivos, clasificación de objetos, etc. que suponen gran cantidad de
cálculo y tiempo para un ordenador pueden ser realizadas de forma instantánea
por un ser vivo, no necesariamente un ser humano.
Ejemplo: El sonar de un murciélago.
El
murciélago debe determinar la velocidad relativa, tamaño y la posición del
obstáculo a través de su sonar. Todo el proceso de extracción de información
ocurre en un cerebro del tamaño de un garbanzo en un tiempo que es la envidia
de los ingenieros que trabajan en sonar y radar.
De estas observaciones nos surge la cuestión
que va ha suponer el nacimiento de las Redes Neuronales Artificiales o ANS
(Artificial Neural Systems).¿Qué parámetros hacen posible la supremacía del cerebro en
unas determinadas tareas frente a las computadoras?.
Curiosamente, las neuronas son mucho más simples,
lentas y menos fiables que una CPU, y a pesar de ello, existen problemas
difícilmente abordables mediante un computador convencional que el cerebro
resuelve eficazmente (reconocimiento del habla, visión de objetos inmersos en
ambiente natural (Ver figura 1), respuestas ante estímulos de entorno, etc.).

Por lo
tanto, la idea que subyace en los ANS es que para abordar el tipo de problemas
que el cerebro resuelve con eficiencia, puede resultar conveniente construir
sistemas que simulen la estructura de las redes neuronales biológicas con el
fin de alcanzar una funcionalidad similar.
Figura
1. Ilustración de una trama
compleja.
La ilustración anterior corresponde a un
dálmata visto de perfil, mirando hacia la izquierda, con la cabeza baja para
olfatear el terreno. Con ello se pretende mostrar la complejidad que supone el
crear aplicaciones para reconocer objetos de la imagen.
Dado que el perro se ha mostrado como una
serie de manchas negras sobre fondo blanco, ¿cómo se puede escribir un programa
de computador para determinar precisamente qué manchas forman el contorno del
perro, qué manchas se pueden atribuir a manchas de la piel y qué manchas son
simplemente estorbos?.
E incluso podríamos plantearnos una cuestión de mucho más interés como
es: ¿Cómo es que nosotros podemos ver rápidamente el perro que hay en la
ilustración, mientras que un computador no es capaz de hacer esta
discriminación?.
3.
Redes Neuronales Biológicas.
Se estima que el sistema nervioso contiene alrededor
de cien mil millones de neuronas,
organizadas mediante una red compleja en la que las neuronas individuales
pueden estar conectadas a varios miles de neuronas distintas. Se calcula que
una neurona del córtex cerebral recibe información,
por término medio, de unas 10.000 neuronas, y envía impulsos a varios cientos
de ellas.
Desde un punto de vista funcional, las neuronas
constituyen procesadores de información sencillos. Como todo sistema de este
tipo, posee un canal de entrada de información, las dendritas; un órgano de cómputo, el soma, y un canal de salida, el axón
(Fig. 2).
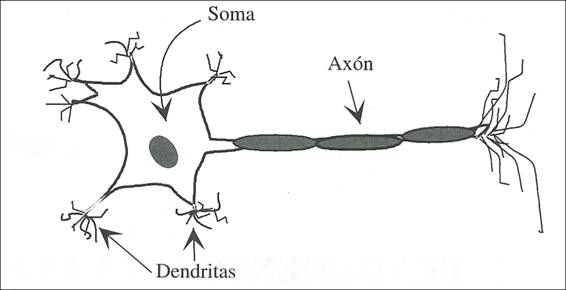
Figura
2. Estructura
de una neurona biológica típica.
La mayor parte de las neuronas poseen una estructura
de árbol llamada desdirías de tal
forma que las neuronas se unen a través de uniones denominadas sinapsis. En el tipo de sinapsis más
común no existe un contacto físico entre las neuronas, sino que éstas
permanecen separadas por un pequeño vacío de unas 0.2 micras. Con relación a la
sinapsis, se habla de neuronas presinápticas (las que envían las señales) y neuronas postsinápticas
(las que las reciben). Las sinapsis son dirigidas, es decir, la información
fluye siempre en un único sentido.
Los tres conceptos a emular de los sistemas nerviosos
son: paralelismo de cálculo, memoria distribuida, y adaptabilidad al entorno:
El procesamiento paralelo resulta esencial en este
tipo de tareas para poder realizar gran cantidad de cálculo en un intervalo de
tiempo lo más reducido posible.
Otro concepto importante que aparece en el cerebro
es el de memoria distribuida. Mientras que en un computador la información
ocupa posiciones de memoria bien definidas, en los sistemas neuronales se
encuentra distribuida por las sinapsis de la red, de modo que si una sinapsis
resulta dañada, no perdemos más que una parte muy pequeña de la información.
El último concepto fundamental es el de
adaptabilidad. Los ANS se adaptan fácilmente al entorno modificando sus
sinapsis, y aprenden de la experiencia, pudiendo generalizar conceptos a partir
de casos particulares.
A partir de las tres propiedades anteriores
concluimos que en la realización de un sistema neuronal artificial puede
establecerse una estructura jerárquica similar. El elemento esencial de partida
será la neurona artificial, que se organizará en capas; varias capas
constituirán una red neuronal, y por último, una red neuronal (o conjunto de
ellas), junto con las interfaces de entrada y salida, más los módulos
convencionales adicionales necesarios, constituirán el sistema global de
proceso. (Fig. 3).
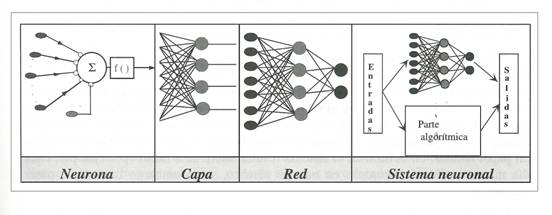
Figura 3. Estructura jerárquica de
un sistema basado en ANS.
5.
Modelo de una neurona artificial.
5.1.
Modelo genérico de neurona artificial.
Como hemos comentado, una neurona es un procesador elemental tal que a
partir de un vector de entrada procedente del exterior o de otras neuronas,
proporciona una única respuesta o salida (Fig. 4).
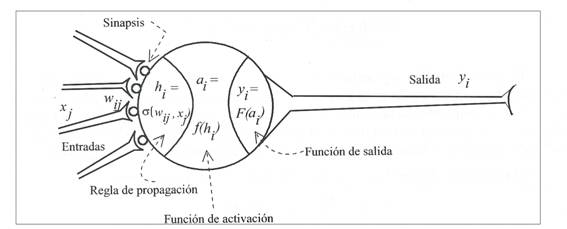
Figura
4. Modelo genérico de una
neurona artificial.
Los elementos que constituyen dicha neurona son:
à Entradas:
x![]() (t). Las variables de entrada y salida pueden ser binarias
(digitales) o continuas (analógicas) dependiendo del modelo de aplicación.
(t). Las variables de entrada y salida pueden ser binarias
(digitales) o continuas (analógicas) dependiendo del modelo de aplicación.
àPesos
sinápticos: w![]() . Representan la intensidad de interacción entre cada neurona
presináptica j y la neurona postsináptica i.
. Representan la intensidad de interacción entre cada neurona
presináptica j y la neurona postsináptica i.
àRegla de
propagación: σ(w![]() , x
, x![]() (t)). Proporciona el valor del potencial postsináptico, h
(t)). Proporciona el valor del potencial postsináptico, h![]() (t), de la neurona i en función de sus pesos y entradas. Es
decir
(t), de la neurona i en función de sus pesos y entradas. Es
decir
h![]() (t) = σ(w
(t) = σ(w![]() , x
, x![]() (t))
(t))
La función más habitual es de tipo lineal, y se basa en una suma
ponderada de las entradas con los pesos sinápticos
h![]() (t) =
(t) = ![]() = w
= w![]()
![]()
El peso sináptico w![]() define en este caso la intensidad de interacción entre la
neurona presináptica j y la postsináptica i. Dada una entrada positiva, si el
peso es positivo tenderá a excitar a la neurona postsináptica, si el peso es
negativo tenderá a inhibirla. Así, se habla de sinapsis excitadoras (peso
positivo) e inhibidoras (peso negativo).
define en este caso la intensidad de interacción entre la
neurona presináptica j y la postsináptica i. Dada una entrada positiva, si el
peso es positivo tenderá a excitar a la neurona postsináptica, si el peso es
negativo tenderá a inhibirla. Así, se habla de sinapsis excitadoras (peso
positivo) e inhibidoras (peso negativo).
àFunción de activación o de transferencia: f![]() . Proporciona el estado de activación actual, a
. Proporciona el estado de activación actual, a![]() , de la neurona i en función de su estado anterior, a
, de la neurona i en función de su estado anterior, a![]() , y de su potencial postsináptico actual. Es decir
, y de su potencial postsináptico actual. Es decir
a![]()
En muchos modelos de ANS se considera que el estado actual de la
neurona no depende de su estado anterior, sino únicamente del actual
a![]()
La función de activación ![]() se suele considerar
determinista, y en la mayor parte de los modelos es monótona creciente y continua. La forma
se suele considerar
determinista, y en la mayor parte de los modelos es monótona creciente y continua. La forma ![]() de las funciones de
activación más empleadas en los ANS se muestra en la siguiente tabla, donde
de las funciones de
activación más empleadas en los ANS se muestra en la siguiente tabla, donde ![]() representa el
potencial postsináptico e
representa el
potencial postsináptico e ![]() el estado de
activación.
el estado de
activación.
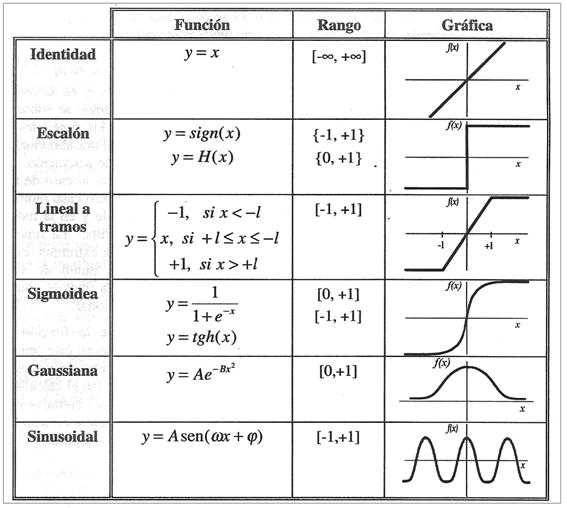
Figura 5.
Funciones de activación habituales.
àFunción de salida: ![]() . Proporciona la salida
actual,
. Proporciona la salida
actual, ![]() , de la neurona i en función de su estado de
activación actual,
, de la neurona i en función de su estado de
activación actual, ![]() . Muy frecuentemente la función de salida es simplemente la
identidad
. Muy frecuentemente la función de salida es simplemente la
identidad ![]() , de modo que el estado de activación de la neurona se
considera como la propia salida. Es decir
, de modo que el estado de activación de la neurona se
considera como la propia salida. Es decir
![]()
Por tanto, la operación de la neurona i puede expresarse de la
siguiente forma:
Por último, veamos como podría ser la interconexión entre varias neuronas:
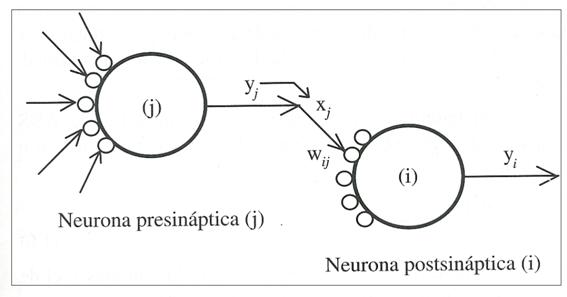
Figura 6.
Interconexión entre una neurona
Presináptica
y una neurona postsináptica.
5.2.
Modelo estándar de neurona artificial.
Considerando que la regla de propagación es la suma
ponderada y que la función de salida es la identidad, la neurona estándar consiste en:
àUn conjunto de entradas
![]() .
.
àUnos pesos sinápticos ![]() asociados a las
entradas.
asociados a las
entradas.
àUna regla de propagación ![]() . La más común suele ser
. La más común suele ser ![]() .
.
àUna función de activación ![]() que representa
simultaneamente la salida de la neurona y su estado de activación.
que representa
simultaneamente la salida de la neurona y su estado de activación.
Todos estos elementos quedan recogidos en la siguiente ilustración que
pone de manifiesto el modelo considerado.
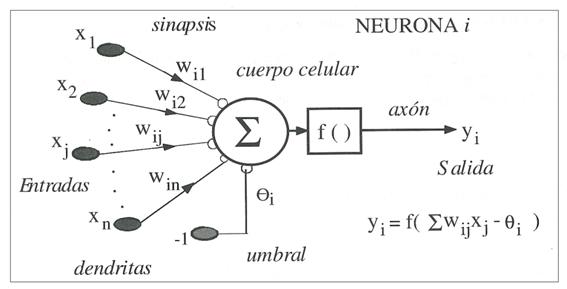
Figura
7. Modelo
de neurona estándar.
Con frecuencia se añade al conjunto de pesos de la
neurona un parámetro adicional, ![]() , que denominaremos umbral, que se resta del potencial postsináptico, por lo que el
argumento de la función de activación queda
, que denominaremos umbral, que se resta del potencial postsináptico, por lo que el
argumento de la función de activación queda
![]()
De forma equivalente, si hacemos que los índices i y
j comiencen por 0 y definiendo ![]() y
y ![]() (constante) podemos
obtener el comportamiento de la neurona
a través de:
(constante) podemos
obtener el comportamiento de la neurona
a través de:
Tan sólo nos quedaría determinar que función de
activación tendría la neurona para determinarla por completo. Dichas funciones
son las mostradas en la tabla de la figura 5.
A continuación mostraremos algunos de los tipos más
usuales de neuronas.
5.2.1.
Dispositivos de umbral.
Consideraremos que las entradas son digitales, por
ejemplo ![]() , y la función de activación es la escalón
, y la función de activación es la escalón ![]() (Heavside),
definida entre 0 y 1, se tiene
(Heavside),
definida entre 0 y 1, se tiene
![]()
Como ![]() cuando
cuando ![]() , y
, y ![]() cuando
cuando ![]() , se tiene
, se tiene
Es decir, si el potencial de membrana supera un
valor umbral ![]() (umbral de disparo), entonces la neurona se activa, si no lo supera,
la neurona no se activa. Este es el modelo de neurona del Perceptrón original
o dispositivo
de tipo umbral.
(umbral de disparo), entonces la neurona se activa, si no lo supera,
la neurona no se activa. Este es el modelo de neurona del Perceptrón original
o dispositivo
de tipo umbral.
McCulloch y Pitts demostraron en 1943 que mediante
redes basadas en este modelo de neurona se podía realizar cualquier función
lógica.
5.2.2.
Neurona sigmoidea.
Las entradas pueden ser tanto digitales como
analógicas y las salidas exclusivamente analógicas. Tomando como función de
activación una sigmoidea (Fig. 5), la
cual se puede definir de las dos formas siguientes en función del intervalo
considerado.
![]() , con
, con
![]() ]
]
![]() , con
, con ![]() ]
]
Este es el modelo usado para el perceptrón multicapa.
6.
Arquitectura de Redes
Neuronales.
6.1.
Definiciones Básicas.
Se denomina arquitectura a la topología o estructura en la que las
distintas neuronas constituyentes de la red neuronal se asocian. En un ANS, los
nodos se conectan por medio de sinapsis; esta estructura de conexiones
sinápticas determina el comportamiento de la red. Las conexiones sinápticas son
direccionales, es decir, la información sólo puede fluir en un sentido (desde
la neurona presináptica a la neurona postsináptica).
En general, las neuronas se suelen agrupar en unidades estructurales
denominadas capas. Dentro de una capa
las neuronas pueden agruparse formando grupos
neuronales. Dentro de una misma capa o agrupación, las neuronas suelen ser
del mismo tipo. El conjunto de una o más capas constituye una red neurona.l.
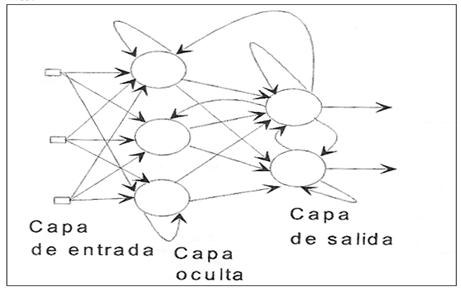
Podemos distinguir tres tipos de capas: (Ver figura 14)
à Capa de entrada: compuesta por neuronas que reciben datos o señales procedentes
del entorno.
à Capa de salida: aquella cuyas neuronas proporcionan la respuesta de la red
neuronal.
à Capa oculta: aquella que no tiene una conexión directa con el entorno.
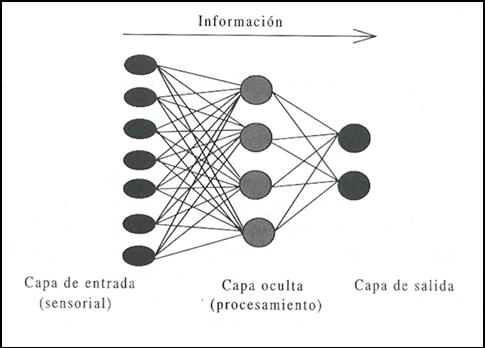
Figura 8. Capas de una red.
Las conexiones entre las enuronas pueden ser
excitatorias o inhibidoras, según el signo del peso
sináptico asociado a la conexión. Si dicho peso sináptico es negativo, entonces
tendremos una conexión inhibitoria,
si por el contrario éste es positivo estaremos frente a una conexión excitatoria.
Esta distinción no suele usarse demasiado, ya que el peso y su magnitud vendrán
determinados en cada instante por el algoritmo de entrenamiento.
Las conexiones pueden clasificarse también en conexiones intracapa y conexiones
intercapa. Las primeras se corresponden con las
conexiones entre las neuronas de una misma capa y, la segunda se corresponde a
las conexiones entre neuronas de distintas capas.
6.2.
Definición formal de Red Neuronal.
Para obtener una definición de red neuronal tenemos que hacer uso del
concepto matemático de grafo. A
través de este término, podemos definir una red neuronal de la siguiente forma:
Una red neuronal es un grafo dirigido con
las siguientes propiedades:
1) A cada nodo i se le asocia un variable de estado ![]() .
.
2) A cada conexión (i, j) de los nodos i y j se el asocia un peso ![]() .
.
3) A cada nodo i se le asocia un umbral ![]() .
.
4) Para cada nodo i se define una función ![]() , que depende de los pesos de sus conexiones, del umbral y de
los estados de los nodos j a él conectados. Esta función proporciona el nuevo
estado del nodo.
, que depende de los pesos de sus conexiones, del umbral y de
los estados de los nodos j a él conectados. Esta función proporciona el nuevo
estado del nodo.
6.3.
Tipos de Redes Neuronales.
Una vez vistos los elementos básicos de toda red neuronal, se pasará a
enumerar las diferentes estructuras en las que dichos elementos se pueden
asociar.
6.3.1.
Red Neuronal Monocapa.
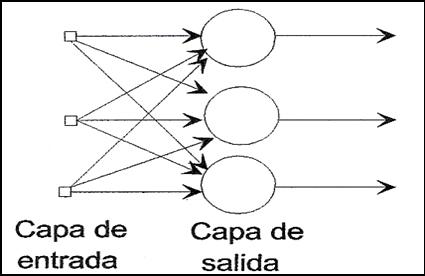
Se
corresponde con la red neuronal más sencilla ya que se tiene una capa de
neuronas que proyectan las entradas a una capa de neuronas de salida donde se
realizan los diferentes cálculos. (Ver figura 9).
Figura
9.
Red Neuronal Monocapa.
6.3.2.
Red Neuronal Multicapa.
Es una generalización de la anterior, existiendo un
conjunto de capas intermedias entre la capa de entrada y la de salida (capas
ocultas). Este tipo de red puede estar total o parcialmente conectada. (Ver
figura 10).
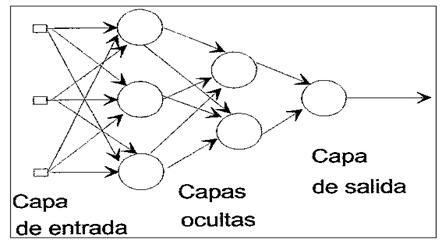
Figura
10.
Red Neuronal Multicapa.
6.3.3.
Red Neuronal Recurrente.
Este tipo de red se diferencia de las anteriores en
la existencia de lazos de realimentación en la red. Estos lazos pueden ser
entre neuronas de diferentes capas, neuronas de la misma capa o, entre una
misma neurona. Esta estructura la hace especialmente adecuada para estudiar la
dinámica de los sistemas no lineales. (Ver figura 11).
Figura
11.
Red Neuronal Recurrente.
7.
Modos de operación: Recuerdo y Aprendizaje.
7.1.
Fase de APRENDIZAJE. Convergencia.
Puede definirse el aprendizaje
como el proceso por el que se produce el ajuste de los parámetros libres de la
red a partir de un proceso de estimulación por el entorno que rodea a la red.
En la mayoría de los casos el aprendizaje consiste simplemente en determinar un
conjunto de pesos sinápticos que permita a la red realizar correctamente el
tipo de procesamiento deseado.
Al construir un sistema neuronal, se parte de un cierto modelo de
neurona y de una determinada arquitectura de red, estableciéndose los pesos
sinápticos iniciales como nulos o aleatorios. Para que la red resulte operativa
es necesario entrenarla. El entrenamiento o aprendizaje se puede llevar a cabo
a dos niveles:
1) A través del modelado de las sinápsis;
que consiste en modificar los pesos sinápticos siguiendo una cierta regla de
aprendizaje, construida normalmente a partir de la optimización de una función
de error o coste, que mide la eficacia actual de la operación de la red.
Si denominamos ![]() al peso que conecta la
neurona presináptica j con la postsináptica i en la iteración t, el algoritmo
de aprendizaje, en función de las señales que en el instante t llegan
procedentes del entorno, proporcionará el valor
al peso que conecta la
neurona presináptica j con la postsináptica i en la iteración t, el algoritmo
de aprendizaje, en función de las señales que en el instante t llegan
procedentes del entorno, proporcionará el valor ![]() que da la modificación
que se debe incorporar en dicho peso, el cual quedará actualizado de la forma:
que da la modificación
que se debe incorporar en dicho peso, el cual quedará actualizado de la forma:
![]()
El proceso de aprendizaje es usualmente iterativo,
actualizándose los pesos de la manera anterior, una y otra vez, hasta que la
red neuronal alcanza el rendimiento deseado.
2) A través de la creación o destrucción de
neuronas; en el cual se lleva a cabo una modificación de la propia arquitectura
de la red.
Los tipos de aprendizaje que pueden distinguirse son:
à
Supervisado.
à No supervisado o Autoorganizado.
à Híbrido.
à Reforzado.
Los
algoritmos de aprendizaje se basan usualmente en métodos numéricos iterativos
que tratan de reducir una función de coste, lo que puede dar lugar a veces a
problemas en la convergencia del algoritmo. En un sentido riguroso, la convergencia
es una manera de comprobar si una determinada arquitectura, junto a su regla de
aprendizaje, es capaz de resolver un determinado problema.
En el
proceso de aprendizaje es importante distinguir entre el nivel de error
alcanzado al final de la fase de aprendizaje para el conjunto de datos de
entrenamiento, y el error que la red ya entrenada comete ante patrones no
utilizados en el aprendizaje, lo cual mide la capacidad de generalización de la red. Interesa más una buena generalización que
un error muy pequeño en el entrenamiento, pues ello indicará que la red ha
capturado el mapping subyacente en
los datos.
7.1.1.
Aprendizaje SUPERVISADO.
En el aprendizaje supervisado se presenta a la red un conjunto de
patrones, junto con la salida deseado u objetivo, e
iterativamente ésta ajusta sus pesos hasta que la salida tiende a ser la
deseada, utilizando para ello información detallada del error que se comete en
cada paso. De este modo, la red es capaz de estimar relaciones entrada/salida
sin necesidad de proponer una cierta forma funcional de partida. Es decir, si
E[W] es una función que representa el error esperado de la operación de la red,
expresado en función de sus pesos sinápticos W, se pretende estimar una cierta
función multivariables ![]() a partir de muestras (
a partir de muestras (![]()
![]() tomadas aleatoriamente por medio de la minimización iterativa
de E[W] mediante aproximación estocástica (las técnicas de aproximación
estocástica estiman valores esperados a partir de cantidades aleatorias
observadas).
tomadas aleatoriamente por medio de la minimización iterativa
de E[W] mediante aproximación estocástica (las técnicas de aproximación
estocástica estiman valores esperados a partir de cantidades aleatorias
observadas).
7.1.2.
Aprendizaje NO SUPERVISADO o
AUTOORGANIZADO.
El aprendizaje no supervisado se puede describir genéricamente como la
estimación de la función densidad de probabilidad ![]() que describe la distribución de patrones
que describe la distribución de patrones ![]() (espacio de entrada).
(espacio de entrada).
En este tipo de aprendizaje se presentan a la red multitud de patrones
sin adjuntar la respuesta que deseamos. La red, por medio de la regla de
aprendizaje, estima ![]() , a partir de lo cual podemos reconocer regularidades en el
conjunto de entradas, extraer rasgos o agrupar patrones según su similitud (clustering).
, a partir de lo cual podemos reconocer regularidades en el
conjunto de entradas, extraer rasgos o agrupar patrones según su similitud (clustering).
7.1.3.
Aprendizaje HÍBRIDO.
En este caso existen en la red los dos tipos de aprendizaje
básicos, supervisado y autoorganizado, normalmente en distintas capas de
neuronas.
7.1.4.
Aprendizaje REFORZADO.
Se sitúa a medio camino entre al aprendizaje supervisado y el
autoorganizado. Como en el primero, se emplea información sobre el error
cometido, pero en este caso existe una única señal de error, que representa un
índice global del rendimiento de la red (solamente le indicamos lo bien o lo
mal que está actuando). Como en el caso del no supervisado, no se suministra
explícitamente la salida deseada.
7.2.
Fase de RECUERDO o EJECUCIÓN. Estabilidad.
Una vez que el sistema ha sido entrenado, el aprendizaje se
desconecta, por lo que los pesos y la estructura quedan fijos, estando la red
neuronal ya dispuesta para procesar datos.
En las redes unidireccionales, ante un patrón de entrada, las neuronas
responden proporcionando directamente la salida del sistema. Al no existir
bucles de realimentación, no existe ningún problema en relación con su
estabilidad. Por el contrario, las redes con realimentación son sistemas dinámicos
no lineales, que requieren ciertas condiciones para que su respuesta acabe
convergiendo a un estado estable o punto fijo. Existe una serie de teoremas
generales que establecen las condiciones que aseguran la estabilidad de la
respuesta en una amplia gama de redes neuronales en ciertas condiciones.
Para demostrar la estabilidad del sistema, dichos teoremas se basan en
el método de Lyapunov.
Dicho método constituye una manera asequible de estudiar la estabilidad de un
sistema dinámico. Consiste en tratar de encontrar una función energía del
sistema, que disminuya siempre en su operación, entonces el sistema es estable.
8.
Clasificación de los modelos de redes neuronales artificiales.
Dependiendo del modelo de neurona concreto que se utilice, de la arquitectura
o topología de conexión, y del algoritmo de aprendizaje, surgirán distintos
modelos de redes neuronales.
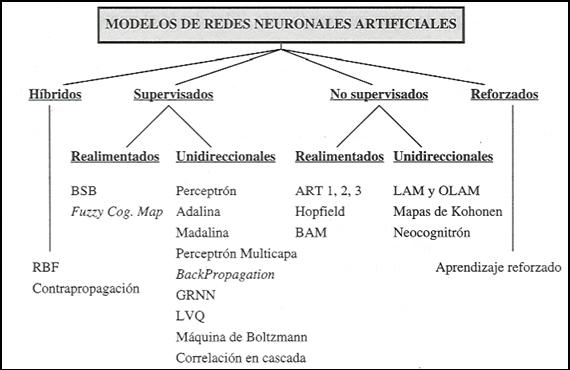
Figura 12. Clasificación de los ANS por el tipo de aprendizaje y
la arquitectura.
9.
El Perceptrón Simple (Rosenblatt, 1959).
Este modelo neuronal fue introducido por Rosenblatt
a finales de los años cincuenta. La estructura del perceptrón se inspira en las
primeras etapas de procesamiento de los sistemas sensoriales de los animales
(por ejemplo, el de visión), en los cuales la información va atravesando
sucesivas capas de neuronas, que realizan un procesamiento progresivamente de
más alto nivel.
El perceptrón simple es un modelo neuronal unidireccional, compuesto
por dos capas de neuronas, una de entrada y otra de salida (Figura 19). La operación
de una red de este tipo, con n neuronas de entrada y m neuronas de salida, se
puede expresar de la siguiente forma:
![]()
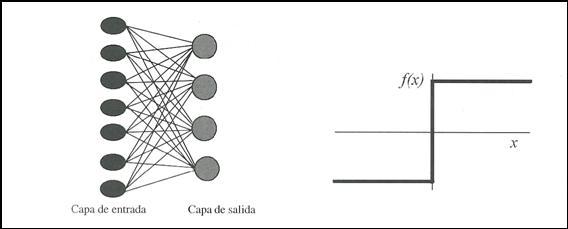
Figura 13. Perceptrón simple y función de transferencia de su
neurona .
Las neuronas de entrada no realizan ningún cómputo, únicamente envían
la información (en principio consideraremos señales discretas {0, 1}) a las
neuronas de salida. La función de activación de las neuronas de la capa de
salida es de tipo escalón (Ver Figura 5). Así, la operación de un perceptrón
simple puede escribirse
![]()
con
H(.) la función Heavside o escalón..
Por tanto, concluimos añadiendo que el perceptrón simple está formado
por dispositivos de umbral y, por
tanto, son útiles para la representación de funciones booleanas.
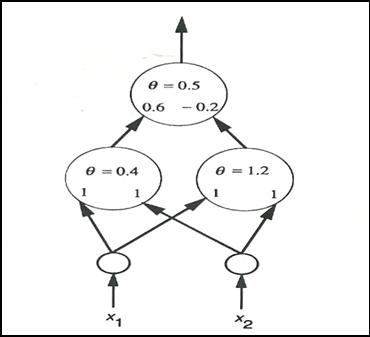
Ejemplo: Sea el perceptrón que se muestra en la figura 14, tal que su salida
es
![]()
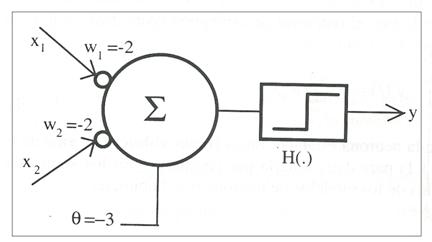
Figura
14. Perceptrón que
implementa una puerta
lógica NAND de dos entradas.
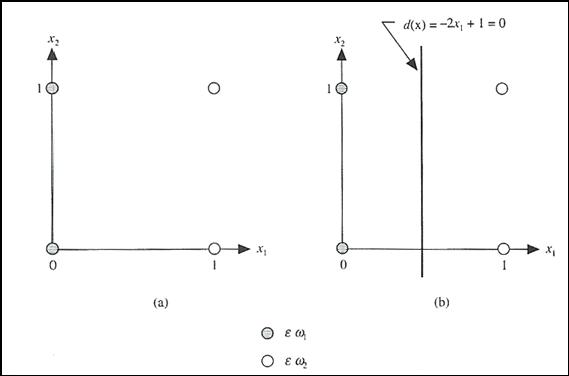
Las entradas ![]() y
y ![]() constituyen un plano, de tal forma que si lo representamos y
marcamos los posibles valores de las entradas obtenemos el resultado mostrado
en la ilustración 15.
constituyen un plano, de tal forma que si lo representamos y
marcamos los posibles valores de las entradas obtenemos el resultado mostrado
en la ilustración 15.
Figura 15. A) Patrones que pertenecen a dos clases. B) Límite de decisión
determinado por entrenamiento.
Dando
valores lógicos a ![]() y
y ![]() podemos construir la
siguiente tabla de verdad:
podemos construir la
siguiente tabla de verdad:
|
|
|
|
|
0 |
0 |
1 |
|
0 |
1 |
1 |
|
1 |
0 |
1 |
|
1 |
1 |
0 |
Podemos comprobar que se trata de la función lógica
NAND.
NOTA: Puede demostrarse que un nodo de tipo umbral
solamente puede implementar funciones linealmente separables, como la NAND. La
XOR (OR-Exclusiva) no es linealmente separable, por lo que no puede ser
implementada por un nodo sencillo como el anterior.
Ejemplo: Sea la red de dos capas con dos nodos en la capa de entrada, tal que
las entradas son binarias. Desearíamos que la red fuera capaz de responder a
las entradas de tal modo que la salida fuera la función XOR de las entradas.
(Figura 16)
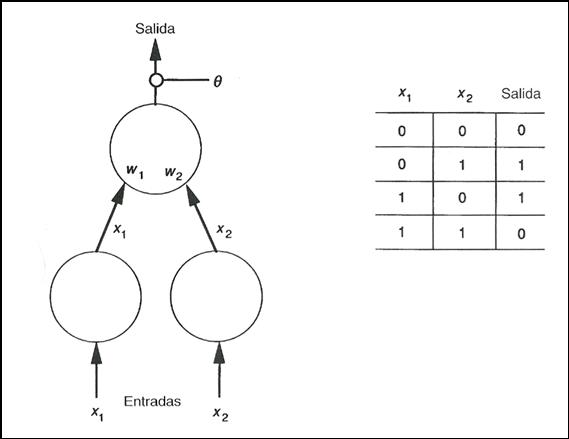
Figura 16. Perceptrón y tabla de
comportamiento de la función lógica XOR.
Para ilustrar el funcionamiento de la función lógica
XOR (OR-Exclusiva), veamos la siguiente tabla que pone de manifiesto su
funcionalidad.
|
|
|
|
|
0 |
0 |
0 |
|
0 |
1 |
1 |
|
1 |
0 |
1 |
|
1 |
1 |
0 |
Nuevamente
podemos ver como las entradas constituyen un plano en el que se pueden colocar
los posibles valores de las entradas (Figura 17). De esta forma podemos
observar que no hay forma de encontrar valores
para ![]() ,
, ![]() y
y ![]() tal que la
representación de la salida de la red consiga separar el plano en dos regiones
como máximo. Esto es para poder clasificar los puntos de una región como
pertenecientes a la clase que posee una salida de 1, y los de otra región como
pertenecientes a la clase que posee una salida nula. Esto se debe a que la
sencilla unidad de umbral lineal no es capaz de llevar a cabo correctamente la
función XOR.
tal que la
representación de la salida de la red consiga separar el plano en dos regiones
como máximo. Esto es para poder clasificar los puntos de una región como
pertenecientes a la clase que posee una salida de 1, y los de otra región como
pertenecientes a la clase que posee una salida nula. Esto se debe a que la
sencilla unidad de umbral lineal no es capaz de llevar a cabo correctamente la
función XOR.
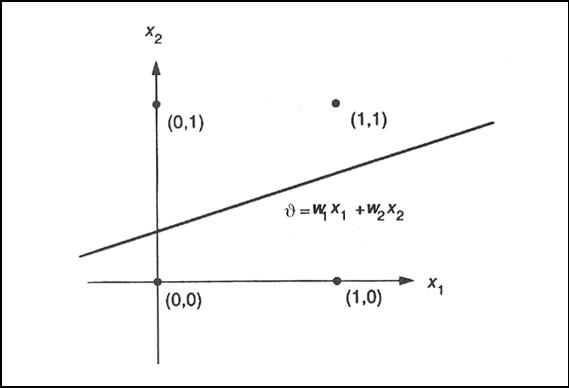
Figura 17. Plano con la
solución alcanzada por el perceptrón anterior.
Para tratar
de resolver esta dificultad tenemos que acudir al concepto de hiperplanos.
En el
espacio tridimensional, un plano es un objeto de dos dimensiones. Un único
plano puede descomponer el espacio tridimensional en dos regiones distintas;
dos planos en tres o cuatro regiones distintas, dependiendo de sus
orientaciones relativas, y así sucesivamente. Por extensión, en un espacio
n-dimensional, los hiperplanos son objetos de (n-1)
dimensiones.
Hay muchos
problemas reales que implican la separación de regiones de puntos de un hiperplano en categorías individuales o clases, que deben
distinguirse de otras clases. Una forma de hacer estas distinciones consiste en
seleccionar hiperplanos que descompongan el espacio
en regiones adecuadas. Esta tarea es bastante difícil de llevar a cabo en
espacio de muchas dimensiones. Sin embargo, ciertas redes neuronales pueden aprender la descomposición adecuada, así
que no es preciso determinarla por anticipado.
En un
espacio general n-dimensional, la ecuación de un hiperplano
se puede escribir de la forma
![]()
En donde los
![]() son constantes, con al menos un
son constantes, con al menos un ![]() , y los
, y los ![]() son las coordenadas del espacio.
son las coordenadas del espacio.
Continuando
con el ejemplo de la XOR veamos como podemos encontrar una solución aproximada.
Si observamos la figura 17 vemos que podríamos obtener una solución si
descomponemos el espacio en tres regiones tal y como se pone de manifiesto en
la figura 18. Una región pertenecería a una de las clases de salida, y las
otras dos pertenecerían a la segunda clase de salida.
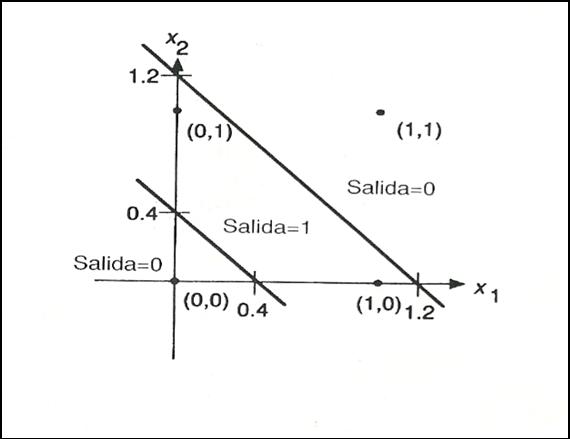
Figura 18. Solución que
se desea alcanzar.
En la figura 19
podemos encontrar un dispositivo de umbral o perceptrón que lleva a cabo tal
descomposición.
Figura 19. Perceptrón con el que se alcanza la solución deseada.
La adición
de dos unidades de capa oculta, o capa intermedia, dan a la red la flexibilidad
necesaria para resolver el problema. De hecho, la existencia de esta capa
oculta nos da la capacidad de construir redes que puedan resolver problemas
complejos.

El objetivo que persigue el
entrenamiento de una red neuronal es básicamente el de establecer unos valores
para el vector de pesos con los cuales el error cometido al evaluar los
ejemplos de entrenamiento sea mínimo.
Una vez calculados estos
pesos la red estará lista para ser probada con otros patrones de test con los
cuales no ha sido entrenada. El objetivo de esta nueva comprobación es que
hemos de probar como se comporta la red cuando las entradas son distintas a las
usadas para el entrenamiento.
Al entrenar una red neuronal
con unos determinados ejemplos de entrenamiento e intentar minimizar el error a
unas cuotas ínfimas, corremos el riesgo de especializar demasiado nuestra red,
la cual se comportará de una manera optima con los ejemplos con los cuales ha
sido entrenada, pero para ejemplos con los que no se ha entrenado se pueden
producir errores considerables.
Todo esto nos lleva a la
conclusión de que hay que minimizar el error, pero no hay que intentar rizar el
rizo, ya que la especialización conlleva una pérdida de generalización.
Si este método de validación
falla debemos optar por la opción de volver a entrenar la red desde el
principio pero con unos pesos iniciales aleatorios distintos a los del
entrenamiento anterior.
Si los resultados han sido
correctos, nuestra red estará lista para funcionar y podremos asegurar que para
nuevas entradas desconocidas para la red esta dará resultados mas o menos correctos.
Como última reseña hemos de
indicar que aunque la fase de entrenamiento sea lenta y tediosa, una vez
finalizada esta ya no hay que volver a entrenar, y además, como el calculo de los resultados que ofrece la red es lineal, estos
se obtienen de una manera muy rápida. Todo esto nos hace llegar a la conclusión
que las redes neuronales son una muy buena aproximación para el cálculo de
funciones no computables algorítmicamente hablando como pueden ser los
problemas con soluciones exponenciales, aunque por otro lado para problemas
algorítmicamente computables se convierten en soluciones lentas y con unos
resultados no tan exactos como fuera deseable.
2.- COMO ENTRENAR.
El entrenamiento de las
redes neuronales se realiza mediante unos algoritmos de entrenamiento que se
basan siempre en intentar buscar los pesos
de las neuronas que ofrezcan mejores resultados.
En este trabajo vamos a
centrarnos en uno solo de esos algoritmos, el algoritmo de BACKPROPAGATION.
Antes de comenzar a entrenar
la red, lo primero que debemos hacer es definir la condición de parada. Esta
condición puede ocurrir por varios motivos:
-
Se ha alcanzado una cuota de
error que consideramos suficientemente pequeña.
-
Se ya llegado a un número máximo de iteraciones que hemos definido como
tope para el entrenamiento.
-
Se ha obtenido un error cero. Si mi red funciona a la perfección, ya no
hay necesidad de tocar nada más
-
Se ha llegado a un punto de saturación en el que por más que entrenemos
ya no conseguimos reducir más el error.
3.- ENTRENAMIENTO DE UN PERCEPTRON.
Para comprender como se
realiza el entrenamiento de una red de neuronas, lo primero que debemos de
hacer es comprender el entrenamiento de una sola neurona, para luego acoplar
varios entrenamientos individuales en uno colectivo para toda la red.
Para el entrenamiento de un
perceptrón lo primero que debemos hacer es inicializar aleatoreamente
su vector de pesos asociado, y después ir actualizando este para conseguir
mejores resultados.
![]()
Para cada iteración
del algoritmo se actualizará el vector de pesos:
![]()
De manera que:
Siendo h un parámetro al que denominaremos tasa de
entrenamiento con un valor positivo y que hará la función de hacer que la
convergencia sea más o menos rápida. Es recomendable que la tasa de
entrenamiento sea pequeña ( entre 0.1 y 0.2) para que
los resultados sean correctos.
Esta forma de recalcular los
pesos se basa en el gradiente descendente de la función de error.
3.1.- FUNCIÓN
DE ERROR
La función de error mide de
una manera numérica la diferencia existente entre la salida ofrecida por la red
y la salida correcta.
Se calcula de la
siguiente manera:
Donde:
-
D es el conjunto de ejemplos de entrenamiento.
-
td es la salida correcta.
-
od es la salida calculada por la red.
3.2.-
GRADIENTE DESCENDENTE
El método del gradiente
descendente se basa en buscar la dirección en la que una pequeña variación del
vector de pesos hace que el error decrezca más rapidamente.
Para encontrar esta
dirección usamos la que nos marca el gradiente de la función de error con
respecto al vector de pesos.
Para llegar a comprenderlo
mejor veamos la siguiente figura en la que se representa el hiperplano
resultante de la evaluación de una función de error dependiente de un vector de
pesos bidimensional.
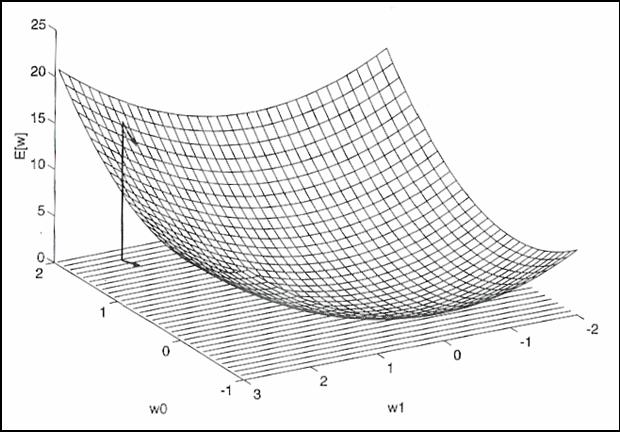
Figura 20. Hiperplano resultante de la evaluación de
una función de error.
La flecha nos indica la
dirección en la cual pequeñas variaciones en los pesos producen las mayores
variaciones en la función de error, que es la misma dirección que la que indica
el gradiente de la función de error con respecto del vector de pesos.
Así la actualización de los
pesos para el método del gradiente descendente quedaría de la siguiente manera:
![]()
![]()
El algoritmo del gradiente descendente es el
siguiente:
GRADIENTE_DESCENDENTE()
-
Inicializar cada peso a un valor aleatorio.
-
Repetir hasta que se cumpla la condición de terminación:
o Inicializar cada Dwi a cero.
o Para cada ejemplo de
entrenamiento hacer:
§
Calcular la salida que ofrece la red
§
![]()
Para cada peso wi hacer:
o
![]()
Para cada peso wi hacer:
FIN GRADIENTE_DESCENDENTE
4.- ALGORITMO “BACKPROPAGATION”.
Cuando necesitamos
representar problemas complejos, no nos basta únicamente con un simple
perceptrón, sino que necesitamos una red de perceptrones
interconectados entre ellos.
Para el entrenamiento de una
red hemos de tener en cuenta que la salida de cada neurona no va a depender
únicamente de las entradas del problema, sino que también depende de las
salidas que ofrezcan el resto de las neuronas. Por este mismo motivo también
podemos afirmar que el error cometido por una neurona no solo va a depender de
que sus pesos sean los correctos o no, sino que dependerá del error que traiga
acumulado del resto de neuronas que le precedan en la red.
Para controlar el error
cometido hemos de redefinir la función de error, de tal forma que la nueva
función de error es la siguiente:

Donde cada parámetro significa lo siguiente:
- ![]() es el vector de pesos.
es el vector de pesos.
-
D es el conjunto de ejemplos de entrenamiento.
-
d es un ejemplo de entrenamiento concreto.
-
Salidas es el conjunto de neuronas de salida.
-
k es una neurona de salida.
-
tkd es la salida correcta que debería dar la neurona de
salida k al aplicarle a la red el ejemplo de entrenamiento d.
-
okd es la salida que calcula la neurona de salida k al
aplicarle a la red el ejemplo de entrenamiento d.
Dentro de una red tenemos varios tipos de neuronas:
-
Neuronas tipo n. Serán las neuronas de entrada a la red.
-
Neuronas tipo h. Serán las neuronas internas de la red.
- Neuronas tipo n. Serán las
neuronas de salida de la red.
Nótese que el número de
neuronas de entrada a la red ha de ser igual al número de entradas del problema
a resolver, y que es recomendable que el número de neuronas de salida sea igual
al número de patrones distintos entre los que pretendamos clasificar los
ejemplos de entrenamiento, así, un determinado ejemplo de entrenamiento
pertenecerá al patrón que indique la neurona de salida cuya salida se aproxime
más a una cota que nosotros definamos (por ejemplo: aquella cuya salida se
aproxime más a 1).
Cuando haya varias neuronas
con un valor de aproximación a la cota establecida que sea muy similar,
podremos decir que “lo mas probable” es que la neurona sea de uno de esos
patrones, sin embargo cuando solo haya una salida que se aproxime claramente
más que el resto a la cota clasificaremos esa ejemplo dentro del patrón que
indique esa neurona.
4.1.-
PSEUDOCODIGO DEL ALGORITMO DE BACKPROPAGATION
Sea:
-
ejemplos: conjunto de ejemplos de entrenamiento.
-
h: tasa de entrenamiento.
-
nin: número de neuronas de entrada de la red.
-
nhidden: número de neuronas internas de la red.
-
nout: número de neuronas de salida de la red.
Definimos:
RETROPROPAGATION(ejemplos, h,
nin, nhidden, nout)
-
Crear la red con el número de neuronas indicado (nin,
nhidden, nout).
-
Inicializar todos los pesos de todas las neuronas a un valor aleatorio.
-
Hasta que se cumpla la condición de parada hacer:
o Propagar las entradas a
través de la red y obtener las salidas.
o Propagar los errores de
atrás hacia delante:
§
Para cada neurona de salida k calcular dk:
![]()
§
Para cada neurona
intermedia h calcular dh:
§
![]()
Actualizar cada peso wji de la red:
·
![]()
con:
FIN RETROPROPAGATION
1.\ PREFACIO.
Un ANS puede simularse mediantes programas ejecutados en ordenadores convencionales.Sin embargo, deberá realizarse en hardware
si se desea aprovechar su capacidad de cálculo masivamente paralelo,
permitiendo así su aplicación a problemas que deban tratarse cantidades masivas
de datos. La tecnología de implementación más habitual hoy en día es la microelectrónica,VLSI,ULSI o WSI y
la disponibilidad de potentes herramientas de CAD para diseño.
2.\
INTRODUCCIÓN.
Uno de los motivos más
importantes del renacimiento de las redes neuronales en la década de los
ochenta fue el desarrollo de la tecnología VLSI.Por
una parte, posibilitó el desarrollo de computadores potentes y baratos,lo que facilitó la
simulación de modelos de redes
neuronales artificiales de un relativamente alto nivel de complejidad. Por otra
parte, la integración VLSI posibilitó la realización hardware directa de ANS.
3.\
ALTERNATIVAS PARA LA REALIZACIÓN DE ANS.
a)Simulación software
Consiste
en modelar el sistema neuronal mediante un programa, que puede ejecutarse en un ordenador
secuencial convencional o bien sobre un
computador de propósito general con capacidad de cálculo paralelo. Es la realización más usual y
barata.
b)Emulación hardware
Se
utilizan sistemas expresamente diseñados para emular un ANS, basados en CPU de altas prestaciones (RISC,DSP,...) o en otros microprocesadores
diseñados específicamente para los ANS (aceleradores
o neurocomputadores de propósito general).
c)Implementación hardware
Se trata de realizar físicamente la rede neuronal en hardware, mediante estructuras específicas que reflejan con cierta fidelidad la arquitectura de la red, que son denominadas neurocomputadores de propósito específico.La tecnología más habitualmente utilizada es la electrónica, bien utilizando dispositivos de lógica programable (como FPGA),bien mendiante integración microelectrónica, que da lugar a ASIC, denominados chip neuronales.
3.1.\SIMULACIÓN
SOFTWARE DE ANS
Denominaremos
simulación software de un ANS a su realización en forma de un programa
ejecutable sobre un computador de propósito general.
Constituye siempre la primera etapa en el desarrollo
de un ANS, por ser el procedimiento más simple, rápido y económico.
El
proceso de simulación de ANS comienza mendiate el
modelado mendiante
programas de ordenador escritos en lenguajes de alto nivel como C o
PASCAL, aunque de esta manera se pierde la capacidad de cáculo
en paralelo.
Los
principales problemas de la simulación en computadores convencionales surgen
del carácter esencialmente secuencial de éstos, en contrapartida al inherente
paralelismo de los ANS.
Por
ejemplo, un problema que precise una red de 100 neuronas (lo que constituye un
sistema relativamente pequeño), incluiría del orden de 10000 conexiones o pesos
sinápticos.Si suponemos que un microprocesador
realiza alrededor de 10 millones de multiplicaciones y acumulaciones por
segundo, podría ejecutar aproximadamente 1000 fases de recuerdo por segundo.
Si
el tiempo de respuesta necesario es del orden de milisegundo, la simulación en
un ordenador convencional resultará sufuciente.
Sin
embargo, si la aplicación requiere 300 neuronas, la red contendrá 90000
conexiones, con lo que sólo podrá realizar 100 fases de recuerdo por segundo.Así para un problema cuya resolución precise miles o millones de
neuronas, como puede ser una tarea de visión o un tratamiento de imágenes
(256x256 pixeles, cada pixel representa una neurona),la simulación sobre un
ordenador convencional puede resultar inoperante y se hace necesaria una
solución distinta, en la que el paralelismo de cálculo sea manifiesto.Una
solución puede ser la utilización de máquinas vectoriales o paralelas de
propósito general, el inconveniente es su precio y la no fácil accesibilidad.
3.2.\ EMULACIÓN HARDWARE DE ANS
Con el término emulación
hardware nos referimos a la utilización de una estructura de procesamiento con
cierta capacida de cálculo paralelo, especialmente
diseñada para el trabajo con ANS.
Se trata ésta de una solución intermedia entre la simulación y la verdadera realización hardware.Normalmente se trata de utilizar una tarjeta coprocesadora dependiente de un cierto host construida tomando com base microprocesadores de altas prestaciones(RISC,DSP,..) o a chips neuronales.Mediante un software de simulación adecuado, se pueden aprovechar las características de cálculo limitadamente paralelo de la tarjeta utlizada para acelerar la simulación de un ANS,por lo que se denominan aceleradores.
No suelen resultar
económicas y tampoco se aprovechan totalmente las posibilidades de cálculo
paralelo de la red.
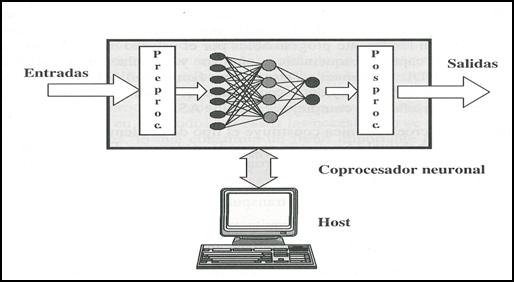
Figura 21. Estructura host-coprocesador neuronal,
constituyendo un neurocomputador.
3.3.\
REALIZACIÓN HARDWARE DE ANS
Consiste en construir
físicamente un sistema cuya arquitectura refleje en cierta medida la estructura
de la red neuronal.Debido a ello, el sistema hardware
debe soportar un gran número de conexiones, en ocasiones globales, y un flujo
elevado de comunicaciones de datos.Estas cirscuntancias limitan considerablemente el tamaño de la
red neuronal que puede ser implementada.
Este
tipo de realización está especialmente indicado para aplicaciones especiales
donde se precisa un alto rendimiento, ya que el diseño se realiza para un
cierto modelo de red neuronal y para una aplicación concreta.
Son
las tecnologías electrónicas las más empleadas en la actualidad, pese a no ser
las más idóneas(especialmente en cuanto a
conectividad).
Las razones fundamentales son la amplia
disponibilidad de los procesos tecnológicos microelectrónicos
y el elevado grado de automatización del diseño.
La
realización electrónica se lleva a cabo mendiante
tecnologías microelectrónicas, en forma de ASIC(Application Specific Integrated Circuit), o mediante
FPGA (Field Programmable Gate Arrays). Aunque el diseño de
ASIC es lo más habitual, en la actualidad la realización mendiante
FPGA presenta la ventaja de un periodo de desarrollo más corto. Aunque su
densidad de puertas es menor, son facílmente
programables por el usuario mendiante herramientas de
CAD que permiten captura esquemática, síntesis y simulación a partir de una
descripción en un HDL (Hardware Description Language), por ejemplo, VHDL o VERILOG. Las FPGA resultan
interesantes para el desarrollo rápido y económico de prototipos o series
pequeñas, aunque no permiten diseños tan complejos como los ASIC.
Sin
duda, la microelectrónica costituye el tipo de implementación
hardware de redes neuronales más habitual.Su diseño
se puede structurar de forma jerárquica de modo que
la realización de un sistema neuronal puede llevarse a cabo desde distintos
niveles de abstracción:
* Nivel de
sistema:
Utilización de coprocesadores,DSP,..
* Nivel de
estructura funcional: ALU's específicas.
* Nivel
de puerta lógica: Lógica de pulsos,lógica
estocástica.
* Nivel de
puerta analógica: Redes de Hopfield,Kohonen,Maxnet,...
*Nivel de transistor: Realización de chips de muy alta densidad de
integración y elevado número de neuronas, como redes de Hopfield.
* Nivel de
modelo: Distintos
modelos de los transistores CMOS.
* Nivel de
layout.
* Nivel de
procesos: Modificadores
del proceso CMOS (EEPROM,fusibles)
4.\
ESPECIFICACIONES DE UN NEUROCOMPUTADOR
Por neurocomputador
entendemos un dispositivo con capacidad de cálculo paralelo, diseñado para la
emulación de redes neuronales artificiales, y en el que cada una de sus
unidades procesadoras puede representar una neurona o más. Habitualmente se
trata de placas coprocesadoras o aceleradoras,
construidas a partir de microprocesadores convencionales o neurochips,
que dependen de un host. El papel del host (un computador convencional) es el de proporcionar al
usuario un medio de comunicación con la placa procesadora mediante su teclado, pantalla y unidades de
almacenamiento masivo. Además, el host gestiona el
sistema completo por medio de un proggrama que actúa
sobre la tarjeta coprocesadora.
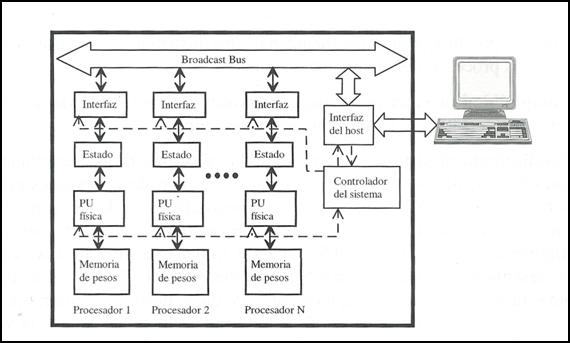
Figura 22. Neurocomputador de propósito general.
Arquitectura clásica orientada a bus, compuesta por
un conjunto de unidades procesadoras o PU, dotadas de memoria local para el
almacenamiento de los pesos de las neuronas virtuales que emulan, y conectadas
a un bus local que las comunica con el host.
Aspectos relevantes:
·
Grado de programabilidad
del sistema.(flexibilidad) Indica la versatilidad para la
emulación de diferentes modelos neuronales.
·
Número de unidades de
procesamiento.(paralelismo) Indica el paralelismo del neurocomputador(disponer de un procesador por neurona suele
resultar costoso, por lo que habitualmente hay que distribuir las neuronas a
emular entre los procesadores realmente disponibles).
·
Complejidad de cada procesadr individual. Es un ímdice
de la potencia de cálculo de cada unidad procesadora.
· Rendimiento del sistema. Mide la velocidad de procesamiento
4.1\
NEUROCOMPUTADORES DE PROPÓSITO GENERAL
Son los diseñados para
emular un gran número de modelos de redes neuronales; constituyen por tanto
máquinas flexibles y versátiles.Tienen un alto grado
de programabilidad
y sus unidades procesadoras o PU serán más complejas(son
un número no muy elevado por lo que cada unidad deberá emular más de una
neurona).
4.2\
NEUROCOMPUTADORES DE PRÓPOSITO ESPECÍFICO
Se trata de sistemas
limitados a la emulación de un único modelo neuronal. Optimizan la ocupación de
área de silicio y alcanzan mayores velocidades de procesamiento para ese modelo
concreto. Como contrapartida, son menos flexibles y limitadamente programables.
Están constituidos por unidades de procesado o PU más simples, pero menos
flexibles, aunque podrá incluir un número mayor de ellas.Dentro
de esta categoría estarían incluídos los
desarrollados en torno a chips neuronales de propósito específico.
5.\ ASPECTOS
GENERALES DE LA REALIZACIÓN VLSI
El aumento continuo de la
densidad de integración hace que la tecnología VLSI se adapte muy bien a la
implementación de sistemas paralelos, como es el caso de los neurocomputadores.Algunos de los mayores problemas de
diseño a la hora de implementar estos sistemas (analógicos o digitales) en
silicio son los siguientes:
-
Los modelos neuronales requieren de altos niveles de conectividad.
-
Se requiere alta velocidad de procesamiento y de comunicación de datos.
-
Debe optimizarse la representación de los datos y el almacenamiento de los
pesos.
El
diseño de neurocomputadores que optimicen paralelismo
de cómputo, rendimiento y flexibilidad precisa tener en cuenta las siguientes
circunstancias que se dan en la integración VLSI.
-
La complejidad de los diseños favorece el desarrollo de estructuras simples,
regulares y rplicables.
- El
cableado ocupa gran parte del espacio eu un circuito
integrado.
-
Los retrasos en las comunicaciones degradan el rendimiento.
-
Las tecnologías MOS,de bajo consumo,requieren concurrencia para lograr muy altos
rendimientos.
-
Debe haber una perfecta coordinación entre la entrada/salida con los cálculos
internos, de modo que el sistema no vea limitado su rendimiento a causa de una
entrada salida lenta.
Teniendo
en cuenta las anteriores circunstancias, un buen diseño VLSI de un neurocomputador debería incluir las siguientes propiedades
arquitecturales:
-
Simplicidad en el diseño, que debe onducir a una arquitectura
basada en reproducciones de unas pocas celdas simples.
- Modularidad que limite los requerimientos de comunicaciones, reduciendo el coste en conexiones.
-
Diseño expandible y escalable.
En
la actualidad existen realizaciones de hasta algunos cientos de neuronas incluyendo miles de sinapsis por unindad de procesado (haciendo uso de tecnologías
analógicas).
5.1\
ARQUITECTURAS RECONFIGURABLES
Mención aparte merecen las
realizaciones digitales de neuroemuladores basadas en
la aplicación de dispositivos con la capacidad de modificar sus estructuras
hardware, adaptándola a los requisitos de la aplicación a la que se desea
realizar.
Perteneciente
a la misma familia de dispositivos que las PLD's,PROM,
PAL o EPLD, las FPGA's (Field Programmable Gate Array) son dispositivos programables de elevado número
de puertas, constituidos por una matriz de celdas lógicas o CLB (Configurable Logic
Block) altamente interconectables a través de una malla de conexiones.Cada una de estas celdas contiene tanto lógica combinacional como biestables
proporcionando así capacidad para generar lógica secuencial.El
interés que presentan estos circuitos lógicos reside en la posibilidad de
configurarlos adecuándolos a los requisitos de los usuarios. Debido al elevado
número de puertas integradas en un dispositovo de
este tipo, y a su reducido coste económico y de tiempo de desarrollo, podemos
encontrar gran cantidad de aplicaciones en las que las FPGA's
cumplen un papel importante.
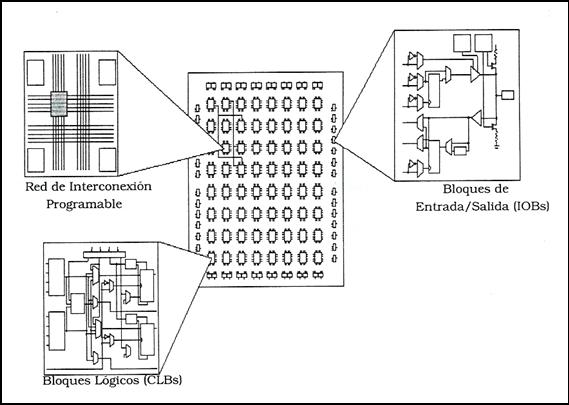
Figura 23. FPGA de Xilinx.
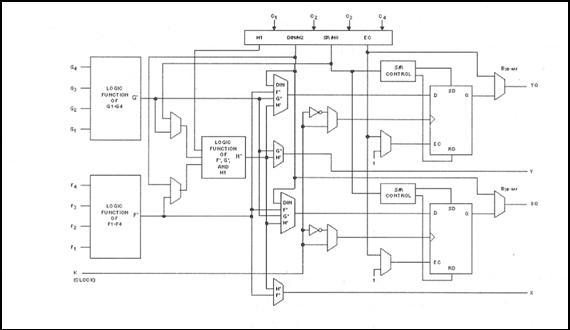
Figura 24. Estructura
básica de un CLB de FPGA de la compañía Xilinx.
6.\
IMPLEMENTACIÓN ANALÓGICA vs DIGITAL
6.1\ PROS Y CONTRAS DE LA REALIZACIÓN ANALÓGICA
Una neurona puede
implementarse fácilmente mediante dispositivos analógicos, tratando de aprovechar
las leyes físicas para la realización de cálculos. Así, la suma ponderada de la
neurona surge de manera directa de la aplicación de las leyes de Kirchhoff en forma de sumas de corrientes. Además, las
características no lineales de los dispositivos favorecen le realización de
funciones de activación de tipos sigmoideo.
Por tanto, inicialmente la realización analógia parece presentar importantes ventajas.
Un
posible esquema de una neurona analógica se muestra en la figura, donde el soma
se representa mendiante un amplificador operacional
(triángulos), y los pesos sinápticos mediante resistencias.
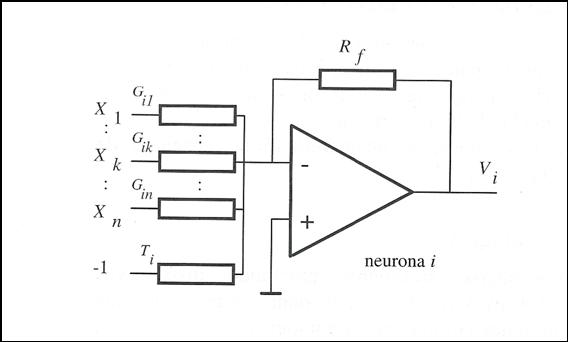
Figura 25. Modelo
sencillo de neurona analógica basada en un amplificador operacional.
Este circuito presenta
notables limitaciones como la de operar con una única función de activación ,excesivo consumo de potencia y la gran cantidad
de área ocupada por el dispositivo y su red de resistencias, que no son reajustables.
Los circuitos analógicos, en general, presentan la interesante característica de permitr el procesamiento de mas de 1 bit por transistor, así como proporcionar una velocidad de proceso mayor que la de los circuitos digitales.
Aunque este tipo de
implementación sea muy adecuada para la realización de modelos de redes
neuronales cabe comentar algunos aspectos negativos de dicha realización:
- Comparándolos con los
circuitos digitales, los analógicos son más susceptibles al ruido en la señal, ruido cruzado,efectos térmicos, variaciones en la tensión de alimetación,....
-
La precisión proporcionada por el procesamiento analógico está limitada normalmente a 8 bits, lo que
resulta inadmisible para muchos algoritmos de aprendizaje (como el BackPropagation).
- El mayor problema atribuible a la integración analógica la no escalabilidad con la tecnología.
6.2\ PROS Y
CONTRAS DE LA REALIZACIÓN DIGITAL
La realización digital de
redes neuronales se basa en el almacenamiento de los pesos y activaciones
neuronales en registros, y en la utilización de estructuras de cálculo clásicas(multiplicadores,AL's,...).
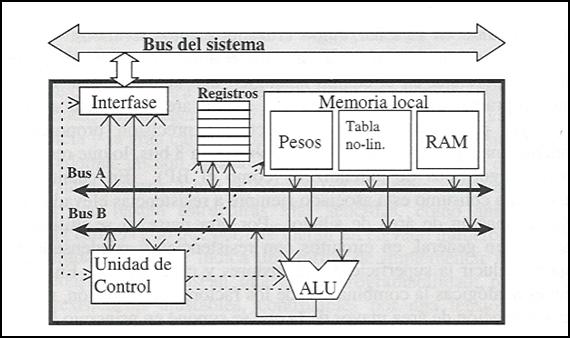
Figura 26. Unidad de
procesamiento digital genérica que implementa un conjunto de neuronas
virtuales.
Para
las redes neuronales menos inspiradas en la biología, es decir,casi
todos los modelos convencionles de
ANS(MLP,SOFM,RBF,...) la integración digtal en un neurochip proporciona características muy interesantes,
como flexibilidad en el diseño, posibilidad de integrar la fase de aprendizaje,
realización de diseños expandibles y precisión elevada.Los diseños digitales proporciona mayores ventajas
globales, pues hay que tener en cuenta que rango dinámico y precisión son
aspectos críticos en muchos modelos neuronales (como el BackPropagation),
y con la tecnología digital es posible alcanzar el nivel requerido.
Con
todo, una de las grandes ventajas del diseño de circuitos digitales VLSI es la
disponibilidad de potentes paquetes CAD, y la posibilidad de abordar los
diseños con una metodoloía modular. Además, otra
importante ventaja es la rápida adecuación de los diseños digitales a las
nuevas tecnologías disponibles con mayor nivel de integración (escaabilidad con la tecnología), junto con la
disponibilidad actual de herramientas de síntesis automática a partir de
descripciones en algún lenguaje de descripción de hardware (como pueden ser
VHDL o VERILOG ) del circuito a construir, diminuyendo
notablemente los tiempos de desarrollo y abaratando costes.
Obviamente,
las desventajas de la implementación digital son el gran consumo de área de
silicio y la velocidad de ejecución relativamente lenta (en comparación con las
realizacione analógicas).
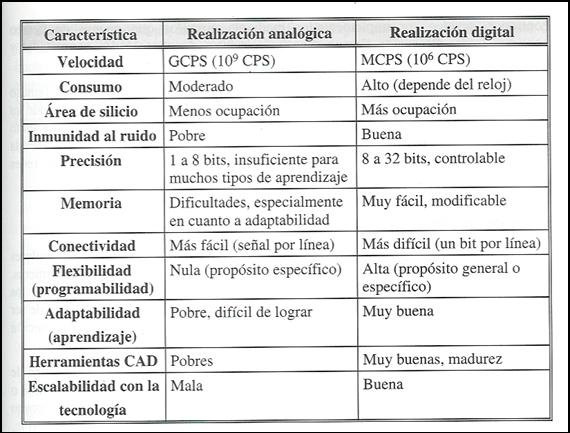
Figura 27. Realización análogica frente a digital.
INTRODUCCIÓN
A continuación pasamos a estudiar varios problemas
de ejemplo resueltos utilizando redes neuronales. Para el estudio de estos
problemas nos hemos basado en diversa documentación ya que no existía un
documento preciso que resolviera con exactitud la totalidad de los problemas.
Estudiaremos los siguientes
problema:
1.- RECONOCIMIENTO DE ROSTROS MEDIANTE UNA
ARQUITECTURA BASADA EN REDES NEURINALES.
2.- RECONOCIMIENTO DE
FIRMAS USANDO UNA
ARQUITECTURA DE
REDES MULTICAPA.
3.- RECONOCIMIENTO DE
PATRONES A PARTIR DE IMÁGENES
AÉREAS.
Para cada uno de estos problemas discutiremos la
arquitectura propuesta, el funcionamiento básico del sistema y los resultados
obtenidos a partir de experimentos realizados.
Al final expondremos diversa bibliografía donde es
posible obtener una más amplia información del problema.
1.- RECONOCIMIENTO DE ROSTROS
MEDIANTE UNA ARQUITECTURA BASADA EN
REDES NEURONALES
Las redes neuronales son una herramienta matemática
que permite la solución de una gran variedad de problemas, en particular
aquellos de difícil modelado. En este trabajo se presenta una arquitectura
basada en redes neuronales para la identificación de rostros. La arquitectura
está formada de varios clasificadores cada uno compuesto, a la vez, de una red
neuronal estándar tipo ART2 conectada a un Mapa de Memoria (MM). Las salidas de
los diferentes clasificadores están conectadas a un sumador común (registro de
evidencias) y a un conjunto de comparadores permitiendo la fusión de datos. Se
prueba el desempeño de la arquitectura con un conjunto limitado de diez
rostros.
1.1-Introducción
El rostro humano es un patrón muy complejo. Los
humanos detectamos e identificamos
rostros en una imagen con muy poco
esfuerzo. El reconocimiento automático de tales
patrones es, a la vez, un problema
difícil e interesante. En años recientes este problema
ha atraído la atención de
muchos científicos.
Un sistema para localizar e identificar
correctamente rostros humanos sería útil en muchas aplicaciones tales como la
identificación de criminales y en sistemas de seguridad y autentificación.
Otras aplicaciones donde el reconocimiento de patrones puede ser usado incluyen
la asistencia en el reconocimiento del habla y la comunicación visual a través del
teléfono y otros medios.
Un sistema completo para el reconocimiento de
rostros humanos debería permitir
realizar las siguientes tareas:
1. Determinar si una imagen
contiene un rostro. Si es así, determinar su número,
posición y tamaño.
2. Determinar la identidad
de cada rostro.
3. Proporcionar una
descripción acerca del rostro (felicidad, enojo, tristeza, etcétera), y
4. Entregar información
extra, por ejemplo, edad, sexo, etcétera.
Obviamente esta tarea es bastante compleja, siendo
aún un problema difícil de
resolver. Muchos aspectos acerca del
reconocimiento de rostros quedan por ser resueltos.
Varios métodos para el reconocimiento de rostros
humanos han sido propuestos, por
ejemplo, otros métodos basados en
redes neuronales, los métodos
usando imágenes de mosaico, y los
métodos usando eigen-caras.
En este artículo nos concentraremos en dar solución
al punto 2 de la problemática
arriba descrita suponiendo que el
rostro ha sido localizado, esto es, el punto 1 ha sido
resuelto. Para esto se propone el
uso de una nueva arquitectura compuesta de varios
clasificadores. Una arquitectura similar,
compuesta de un solo clasificador, es usada en
el libro de Rayón y Figueroa
(ver referencias) para el reconocimiento de formas poligonales simples. El funcionamiento
de la nueva arquitectura se basa en el hecho de que para reconocer un rostro es
necesario descomponerlo en un conjunto de partes llamadas características
visuales (CV). Una CV pudiera ser, por ejemplo, una región alrededor de un
punto, un conjunto de puntos, etcétera. A partir de cada CV, un vector de
atributos es obtenido. Este vector de atributos es entonces usado para entrenar
la red neuronal y construir su mapa de memoria con el clasificador
correspondiente.
Durante la etapa de reconocimiento, una lista
restringida de las personas obedeciendo
a una descripción de entrada
es obtenida en una primera instancia, a la salida del
registro de evidencias, en forma de
un histograma. Finalmente, esta lista se reduce a
través de un método de recorte (el
conjunto de comparadores hace esto) para obtener
la lista final de posibles
candidatos correspondiendo a la descripción de la imagen de
prueba.
1.2.-Arquitectura
y funcionamiento.
Como mencionamos anteriormente, la arquitectura
propuesta para el reconocimiento de
rostros humanos se compone de
varios clasificadores, cada uno compuesto, a la vez,
de una red neuronal (RN)
estándar tipo ART2 conectada a un Mapa de Memoria
(MM). Las salidas de los diferentes clasificadores
están conectadas a un sumador
(registro de evidencias)
común y a un conjunto de comparadores (figura 1). Para ser
útil, la arquitectura necesita
que cada RN sea entrenada y que cada mapa de memoria
sea construido. Para esto
usamos la siguiente metodología la cual está dividida en dos
fases, de inicialización y de
indexado (figura 2). Es durante la primera fase que la RN es
entrenada y el MM es construido.
Nótese que ambas fases comparten dos etapas:
detección de características visuales
y codificación de características visuales.
El acrónimo
ART viene del inglés Adaptive Resonance
Theory, modelo inicialmente propuesto por G. A. Carpenter and S. Grossberg en 1986 para extender de los mecanismos de
aprendizaje competitivos de contrapropagación y mapas
autoorganizados (ver referencias). El 2 de ART 2 indica que la red puede
procesar entradas analógicas, a diferencia de la ART 1, que solo es capaz de
procesar entradas binarias.
Así pues, la arquitectura quedaría:

Figura 28. Arquitectura
propuesta
Dónde cada red neuronal ART2 está conectada a un
mapa de memoria cuyas salidas son entradas de sumadores conectados finalmente a
una etapa de comparadores.
El funcionamiento de la arquitectura propuesta se
basa en el hecho de que para reconocer un rostro, es necesario descomponerlo en
un conjunto de partes llamadas características visuales (CVs).
Estas CVs permitirán como veremos más adelante, el
reconocimiento eficiente de personas a través de información visual.
Para detectar las características visuales
precedemos:
Un conjunto selecto de puntos es primeramente
detectado de una imagen del rostro.
Estos puntos son los mostrados en la figura mostrada
a continuación. Actualmente, estos puntos son seleccionados manualmente. A
partir de estos cinco puntos, otros cuatro puntos son calculados y marcados.
Todos estos puntos serán llamados en adelante puntos de interés. Se muestran a continuación y son obtenidos en
términos de la distancia entre los puntos 2 y 3. Con este conjunto de puntos, la siguientes CVs son derivadas:
a.
Todos los píxeles encerrados en el rectángulo formado por los puntos 6,7, 8 y 9.
b. El
triángulo formado por los puntos 1, 2 y 5.
c. El
triángulo formado por los puntos 2, 3 y 5.
d. El
triángulo formado por los puntos 3, 4 y 5.
e. El triángulo
formado por los puntos 1, 4 y 5.
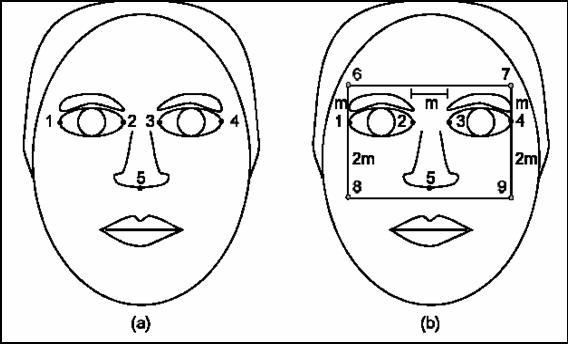
Figura 29. Obtención de CVs
Las fases de la metodología llevada a cabo, es
decir: Inicialización e indexado se pueden resumir con la siguiente figura:
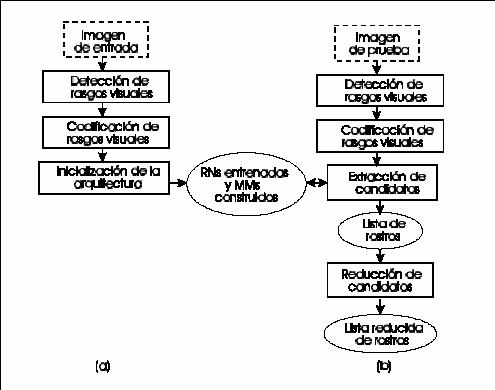
Figura 30.
(a)
à Fase de Inicialización. (b) à Fase de indexado.
Las características visuales obtenidas en
anteriormente son codificadas en términos de vectores de atributos; para
calcular estos vectores se procede:
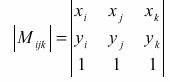
a.-Los cinco puntos 1, 2, 3,
4 y 5 mostrados anteriormente son codificados mediante el siguiente vector de
tres componentes:
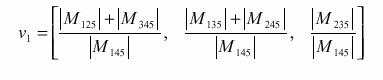
Dónde:
b.-Los niveles de intensidad
encerrados por la ventana formada por los píxeles 6,
7, 8 y 9 son codificados en forma global como un
vector de atributos compuesto por tres de los invariantes a translación,
rotación y escala de (ver referencias: M. K. Hu)
Experimentalmente, hemos probado que de entre los siete invariantes, los
propuestos son los menos sensibles a cambios. Sea este vector:
![]()
Estos dos vectores de atributos (a los que alguna de
las referencias denominan VA) son usados para entrenar las redes neuronales.
A continuación mostramos la detección de cada uno de
los puntos de interés en una fotografía con rostro real:
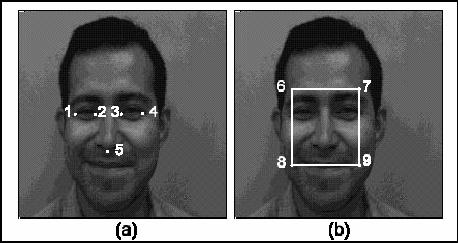
Figura 31. Puntos de interés en una
fotografía real.
1.3.-
Inicialización.
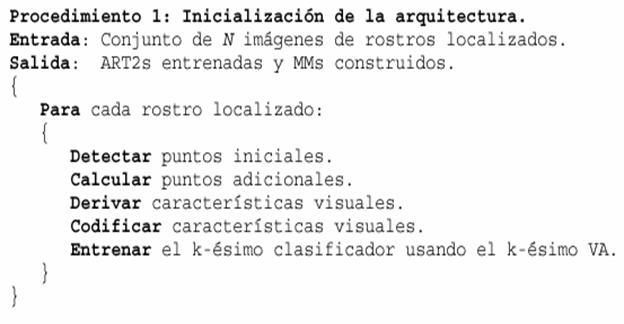
Para llevar a cabo esta fase, un procedimiento
compuesto de tres etapas es usado.
Cada una de estas etapas es explicada con detalle a
continuación.
Etapa de
entrenamiento de la red neuronal y construcción del MM:
Durante esta
etapa, cada ART2 y su MM son, respectivamente, entrenada y construido.
Para esto el siguiente procedimiento es aplicado:
Al final de este procedimiento iterativo, la
arquitectura habrá sido inicializada, esto es
las RNs
y sus MMs habrán sido, respectivamente entrenadas y
construidos.
La arquitectura final tiene la misma estructura que
la mostrada en la figura 1, excepto
que el número de clasificadores
es dos, uno por cada vector de atributos obtenido.
Nótese que cada ART2 tiene como entrada un vector de
atributos y un número de
salidas igual al número de clases
generadas por la ART2, dependiendo del factor de
vigilancia usado (ver referencias). Nótese también que
cada MM tiene tantas filas como salidas provistas por la ART2 y tantas columnas
como rostros usados para entrenar la ART2. Cada localidad del MM contiene un
valor el cual representa el número de veces que un VA se encuentra presente en
cada rostro entrenado. Este valor es ponderado
dependiendo del número de objetos
conteniendo ese VA, entre más objetos contengan
ese VA, más pequeño será el
peso asignado a ese VA.
El conjunto de compuertas de habilitación determina
el modo de operación del sistema
(inicialización o
indexado). El registro de evidencia almacena los votos ponderados
obtenidos por cada rostro durante la
etapa de selección de candidatos.
Finalmente, el conjunto de comparadores es usado
durante la etapa de reducción de
candidatos para seleccionar de entre
estos rostros, aquellos con más
votos en términos de un umbral
previamente escogido. Normalmente cualquiera de
estos rostros corresponderá al
rostro presente en la imagen de prueba. Idealmente, la
lista reducida debería contener
el modelo del rostro presente en la imagen.
Una red neuronal ART2 fue escogida ya que permite,
por un lado, agrupar
automáticamente patrones para formar
cúmulos de una manera auto organizada y, por
otro lado, debido a sus
propiedades inherentes de indexado. Cada MM es construido conforme cada red es
entrenada.
Selección del
umbral (¶) de
vigilancia para cada clasificador:
Recuérdese
que elnúmero de cúmulos provistos por una ART2
depende del valor escogido para ¶
Si el valor escogido para ¶ es muy pequeño, una gran
cantidad de cúmulos será generada (vectores de atributos muy similares serán
puestos en cúmulos diferentes).
Inversamente, si el valor escogido para ¶ es muy grande, pocos
cúmulos serán
generados (vectores de rasgos muy
disimilares serán agrupados en el mismo cúmulo).
En este trabajo, el ¶ para un clasificador dado
fue escogido de forma que el clasificador
permitiera diferenciar lo mejor
posible entre VAs de personas diferentes y agrupar VAs
de la misma persona. Para
lograr esto, se calculó, primeramente, la diferencia E entre
VAs de personas diferentes y la
diferencia F entre VAs de la misma persona se
seleccionó un valor de umbral inicial ¶0,
como el promedio de E. Enseguida, se
comparan los valores de E y F con el
valor de ¶0.
Si E > ¶0,
significa que ¶0 diferenció
los VAs
de personas diferentes, y se incrementa en 1 un contador CD (previamente
inicializado a cero). Si F > ¶0,
significa que ¶0 confunde los VAs de la misma persona, y se incrementa en 1 un contador
CC (previamente inicializado a cero).
Este mismo
proceso se repitió para diferentes valores de i con i=i-1+. Finalmente, se
seleccionó el valor de umbral óptimo como el máximo de CD-CC, esto es aquel que
diferencia mejor entre VAs de personas diferentes y
confunde menos entre VAs de la misma persona.
Ponderación de
los mapas de memoria:
Una vez que los mapas de memoria han sido
construidos, estos son ponderados. Para esto se usa el siguiente procedimiento
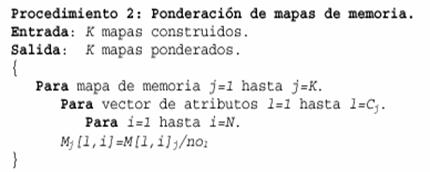
donde Mj[l,i] es una de las localidades del j-ésimo
mapa de memoria, Cj el número de
cúmulos generado por el j-ésimo clasificador y nol el
número de objetos conteniendo el
l-ésimo vector de atributos.
1.4- Indexado.
Durante esta fase, los vectores de atributos
calculados a partir de las características
visuales en una imagen de prueba son
usados para recuperar del banco de modelos el
conjunto de rostros buscado. Para
esto la imagen de prueba es primeramente
procesada por medio del conjunto de
técnicas descritas en las secciones anteriores.
Cada VA es usado para extraer del mapa de memoria
correspondiente los rostros que
produjeron dicho VA dando como
resultado una lista de rostros candidatos. Esta lista es
finalmente reducida por medio de un
mecanismo de umbralisado. Estas dos etapas son
enseguida descritas en más detalle.
Selección de
candidatos:
Durante esta etapa, cada vector de atributos
obtenido a partir de las características
visuales en una imagen de prueba es
presentado al sistema. Si este vector es lo
suficientemente similar a uno de los
aprendidos por la red neuronal (en términos de la
distancia euclidiana), entonces la
salida correspondiente de dicha red será habilitada
seleccionado una fila de su mapa de
memoria. Los votos ponderados en esa fila serán
enviados al registro de evidencia.
Este proceso se repite para cada VA. Al final se
tendrá un conjunto de hipótesis
arregladas como un histograma de pesos ponderados,
(ver figura). Este
histograma se obtiene del registro de evidencias.
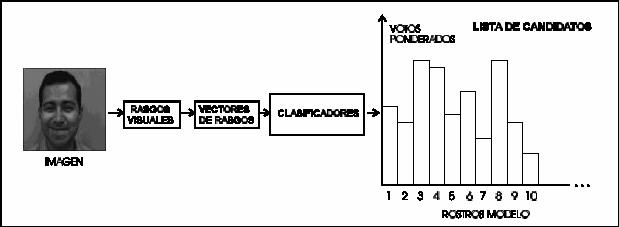
Figura 32. Selección de candidatos
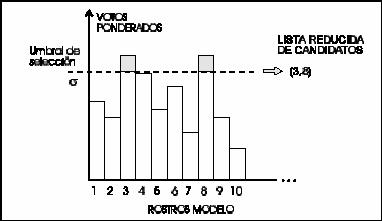
Figura 33. Reducción de candidatos
Reducción de candidatos.
Es claro que al final del proceso anterior se tendrá
un histograma conteniendo los pesos
ponderados que cada rostro ha recibido
durante dicho proceso (para un ejemplo, ver la
figura). Algunos rostros habrán
recibido más votos que otros. Es necesario decidir
que rostros se aproximan lo más
al rostro presente en la imagen. Intuitivamente,
aquellos rostros con más votos serán
los mejores candidatos. Una manera de decidir
que objetos se encuentran
presentes en la imagen consiste en usar un umbral de
selección, digamos . Así, aquellos
rostros cuyos votos se encuentren arriba de
serán
seleccionados como los mejores
candidatos. Para decidir si un rostro se encuentra
presente en la imagen de entrada se
usa el siguiente algoritmo:
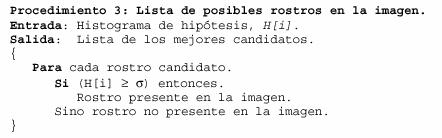
H[i] contiene los votos ponderados recibidos por el
rostro i durante el proceso de
extracción de candidatos y es el umbral de selección. En este
trabajo, fue escogido
de forma que la lista final de
candidatos contenga solamente los dos rostros con los
votos más altos. Esta selección
dio resultados aceptables. Por ejemplo, la lista final contiene los rostros 3 y
8, lo cual significa que el rostro presente en la imagen es ya sea el 3 o el 8.
1.5.-Resultados
experimentales y discusión
En esta sección, el desempeño de la arquitectura
propuesta para el reconocimiento de
rostros es probado. Para esto se
usa el conjunto de imágenes mostrado en la figura.
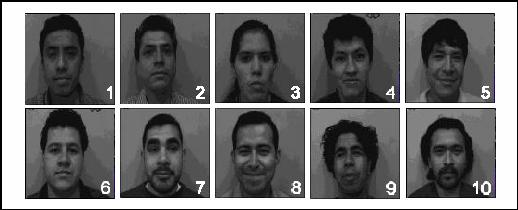
Figura 34. Un conjunto de imágenes de prueba.
1.6.-Entrenamiento
de los clasificadores.
Para cada uno de los rostros mostrados en la figura
6, el conjunto de rasgos visuales
fue extraído según se explicó
en la sección anterior. A partir de estos rasgos visuales, los vectores de
atributos correspondientes fueron igualmente calculados. Estas cantidades permitieron
entrenar cada uno de los clasificadores.
Como se explicó en la sección anterior, el valor
de se escogió de forma que permitiera,
al mismo tiempo, diferenciar
entre rostros de clases diferentes y agrupar rostros de la
misma persona. Para compensar
variaciones en los "invariantes", se usaron 40
imágenes diferentes (4 para cada una
de los 10 rostros). Estas fueron obtenidas al
colocar la cámara a diferentes
distancias con respecto al sujeto, tratando de mantenerlo
siempre dentro del campo visual del
sensor. Se le pidió girar un poco el rostro y
cambiar, a la vez, de expresión
facial. Para cada una de las cuatro muestras seis
conjuntos de vectores de atributos
fueron obtenidos dando como resultado un total de
240 vectores para entrenar los cuatro clasificadores.
1.7.-Reconocimiento.
Otras cien imágenes (diez por cada uno de los diez)
diferentes a aquellas usadas
durante el entrenamiento fueron
adquiridas. Estas fueron obtenidas de nuevo al situar la
cámara a diferentes distancias con
respecto al sujeto, tratando de mantenerlo siempre
dentro del campo visual del
sensor. De nuevo, se le pidió girar un poco el rostro
cambiando a la vez de expresión
facial.
El número de veces (expresado en por ciento) que un
rostro fue correctamente
reconocido se muestra en la tabla. Un
rostro fue considerado como no reconocido si
este no estaba presente en la
lista reducida de candidatos. De esta tabla se puede ver
que el desempeño promedio del
sistema es del 87%.

Figura 35. Resultados experimentales
1.8.-Conclusiones
y trabajo futuro.
Como conclusión, en este trabajo se presentó
un sistema para el reconocimiento de
rostros a partir de una sola imagen
en presencia de pequeñas deformaciones como
traslaciones, rotaciones, cambios de
tamaño y diferentes expresiones faciales. La
arquitectura se compone de dos
clasificadores cada uno compuesto, a la vez, de una
red neuronal estándar tipo ART
2 conectada a un Mapa de Memoria (MM). Las salidas
de los diferentes
clasificadores están conectadas a un sumador (registro de evidencias)
común y a un conjunto de
comparadores para la fusión de datos.
Durante una primera fase varios tipos de
rasgos visuales fueron extraídos de una
imagen de un rostro. A partir de
estos rasgos visuales varios vectores de atributos
fueron también obtenidos. Estos
vectores de atributos fueron entonces usados para
entrenar los clasificadores
correspondientes. Una vez entrenado el sistema, el proceso
de identificación es llevado a
cabo. Este consiste de dos pasos. Durante el primer paso,
una lista restringida de las
personas obedeciendo a una descripción de entrada es
obtenida en una primera instancia a
la salida del registro de evidencias, en forma de un
histograma. Finalmente, durante el
segundo paso, esta lista es reducida a través de un
método de umbral, para obtener la
lista final de posibles candidatos correspondiendo a
la imagen de prueba. El
desempeño de la arquitectura se probó con un conjunto
limitado de diez rostros. Los
resultados fueron satisfactorios.
Una de las principales ventajas de este sistema
reside en el hecho de que los rasgos
usados para calcular los vectores
para describir un rostro son calculados a partir de
solo cinco puntos, lo cual
simplifica bastante el procesamiento.
Actualmente, estan
estudiando:
1) aumentando el número de rostros en el
banco de datos para probar el desempeño del sistema en presencia de bases de
datos más grandes, 2
2) adicionando más clasificadores para verificar
si el desempeño del sistema mejora,
3) buscando un procedimiento automático
para encontrar el óptimo para cada
3)clasificador.
4) tratando de extender
la arquitectura propuesta para usar otro tipo de
4)datos personales como voz e
información contenida en huellas dactilares, con el
4)objetivo de mejorar el desempeño del
sistema. Nuestra meta consiste en extraer tan
4)rápidamente como sea posible del banco
de modelos, una lista restringida de personas, de acuerdo a una descripción de
entrada, cuando diferentes tipos de datos personales son presentados a la
entrada del sistema.
1..9.-Referencias.
[1] M. Turk and A. Pentland, Face recognition using eigenfaces,
Proc. of the IEEE
Conference on Computer Vision and Pattern Recognition, pp. 586-591
(1991).
[2] B. S. Manjunath, R. Chellappa and C.
von der Malsburg, A feature
based approach
to face recognition, Proc. of the IEEE Conference
on Computer Vision and Pattern
Recognition, pp. 373-378 (1991).
[3] M. Kosugi, Robust identification of human face using mosaic
pattern and BMP, Proc.
of the IEEE Workshop on Neural Networks for
Signal Processing, 296-305, (1992).
[4] R. Brunelli and T. Poggio, Face
recognition: features versus templates, IEEE Trans.
on Pattern Analysis and Machine Intelligence,
15(10):1042-1052, (1993).
[5] D. J. Beymer, face recognition under varying pose, Proc. of the
IEEE Conference on
Computer Vision and Pattern Recognition, pp. 756-761 (1994).
[6] M. S. Kamel, H. C. Suen, A. K. C. Wang,
T. M. Hong and R. I. Campeanu, Face
recognition using perspective invariant
features, Pattern Recognition Letters, 15:877-
883, (1994).
[7] F. Gaudail, E. Lange, T. Iwamoto, K. Kyuma
and
using local autocorrelations and multiscale
integration, IEEE Trans. on Pattern Analysis
and Machine
Intelligence, 18(10):1024-1028, (1996).
2.- RECONOCIMIENTO DE FIRMAS
USANDO REDES NEURONALES MULTICAPA
1.-
INTRODUCCIÓN
El reconocimiento de firmas es un tema de
investigación intensa debido a la gran importancia que tiene, entre otros
aspectos, en el sistema financiero. Sin embargo no existe todavía un método
suficientemente confiable, especialmente en la detección de firmas
falsificadas. En este trabajo se desarrolla y evalúa un sistema de
reconocimiento de firmas estáticas por medio de extracción de características
(momentos de proyección, envolvente inferior, envolvente superior, envolvente
lateral derecha y envolvente lateral izquierda) a partir de un arreglo de 5
redes neuronales Backpropagation extraídas de la
firma estática. El sistema propuesto presenta mejor funcionamiento comparando
con otros métodos, siendo además simple su realización. La comparación de los
resultados obtenidos de este método con respecto a ADALINE muestran que la
propuesta reconoció la totalidad de las firmas utilizadas para su evaluación.
Mientras que ADALINE presentó una efectividad del 97.8%. Aunado a esto la Red propuesta es
insensible al tamaño y la posición de la firma, características que la hace
atractiva para aplicaciones practicas.
A través del tiempo se han desarrollado sistemas
capaces de simular el comportamiento del cerebro humano en la realización de
funciones especificas, siendo una de los más importantes paradigmas utilizados
en las Redes Neuronales y la Inteligencia Artificial, que son una herramienta
primordial para el desarrollo de sistemas para el reconocimiento de caracteres
manuscritos, reconocimiento de voz, reconocimiento de rostros, reconocimiento
de firmas y otras aplicaciones biométricas que han tenido éxito.
Para el reconocimiento de firmas se tiene
principalmente los siguientes métodos: el reconocimiento en línea (el
reconocimiento dinámico) y el reconocimiento fuera de línea (el reconocimiento
estático). El sistema propuesto presenta mejor funcionamiento comparando con
otros métodos propuestos teniendo además simple su realización.
2.- SISTEMA
PROPUESTO
El sistema propuesto consiste en una etapa de
extracción de envolventes y otra de la extracción de parámetros estadísticos.
Seguido del entrenamiento en paralelo de cinco redes neuronales tipo BACKPROPAGATION, cada una de las cuales
se entrenarán con los valores obtenidos de las envolventes superior, inferior,
derecha e izquierda de la firma y la quinta red se entrenará con los valores
obtenidos de los parámetros estadísticos, para finalizar se utilizarán los
valores que arrojen las redes y se decidirá a quién pertenece la firma. El
sistema propuesto se muestra en la figura.
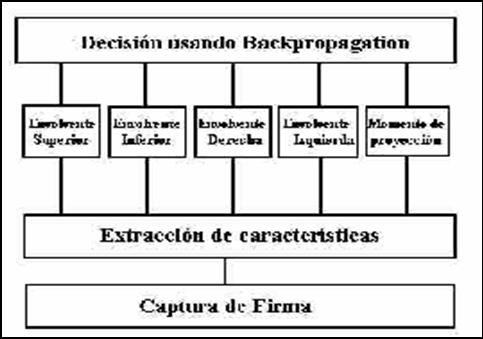
Figura 36. Sistema propuesto.
Extracción de envolventes
Una vez que las firmas han sido digitalizadas se
procede a la extracción las envolventes superior, inferior, izquierda y derecha
de la firma, y cada envolvente se divide en 12 partes, a cada una de ellas se
le asigna un valor entero que representa la forma de la parte.
A continuación se presentan las envolventes
superior, inferior, izquierda y derecha respectivamente de una firma separados
en 12 partes con sus valores asignados.
El criterio que se tomó fue el siguiente:
0 No había píxeles en la submatriz
1 Había píxeles pero la información no formaba
ningún valle, ni un pico
2 Se encontraba información en forma de pico
3 Se encontraba información en forma de valle
Figura 37. Firma capturada y difitalizada
Figura 38. Envolvente 1 Figura 39. Envolvente 2
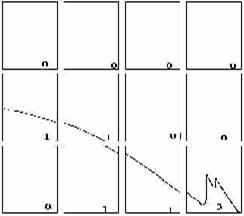
Figura 40. Envolvente 3 Figura
41. Envolvente 4
Parámetros estadísticos
Con el método utilizado para extraer los parámetros
estadísticos se obtienen valores de Kurtosis, valor Skewness, [1] valor relativo entre Kurtosis
y Skewness y valor relativo entre proyección vertical
y proyección horizontal de la firma bajo análisis.
3.-RESULTADOS
OBTENIDOS
Para evaluar el sistema propuesto, se generó un base
de datos que consiste de 130 firmas (15 firmas de 9 personas), 90 firmas (10
firmas de 9 personas) son usados para entrenar las cinco redes separadamente,
45 firmas (5 firmas de 9 personas) son usados para evaluación de
funcionamiento del sistema propuesto. Los
resultados de la simulación computacional realizados en una Workstation Kayak
XA mostraron que aproximadamente el 100
por ciento de las firmas se reconoce correctamente. Los factores importantes
para reconocimiento son sobre todo la envolvente superior, envolvente derecha y
parámetros estadísticos de la firma. Estas características contribuyen más que
la envolvente inferior e izquierda al funcionamiento de reconocimiento de la
firma, puesto que tiene menos información.
4.-REFERENCIAS
[1] R. Bajaj and
[2] F. Leclerc and R. Plamondon,
"Automatic Signature Verification: The State of the Art 1989- 1993",
International Journal of Patter Recognition and Artificial Intelligence Vol. 8,
No. 3 , Pag. 643-660, 1994.
[3] M. Ammar, "Progress in Verification
of Skillfully Simulated Handwritten Signature",
International Journal of Patter Recognition and Artificial Intelligence, vol.
5, No. 1 & 2, pag. 337-351, 1991.
[4] K. Toscano M., G. Sánchez P., M. Nakano
M. y H. Pérez M., "Reconocimiento
de Firmas por Medio de Extracción de Características", Proc.
of 2nd. International Congress of Research in Electrical and Electronics
Engineering, CIIIEE'98, Sep. 98.
3.- RECONOCIMIENTO DE PATRONES A PARTIR DE IMÁGENES
AÉREAS.
1.-INTRODUCCIÓN.
La fotointerpretación es una herramienta útil para
reconocer patrones y realizar diversos tipos de
Planificación Territorial a partir de fotografías aéreas. Hasta ahora,
el trabajo de fotointerpretación se realiza con la participación de expertos
humanos. El desafío consiste en incorporar, paulatinamente, el computador en
esta tarea. El presente trabajo, plantea realizar una clasificación de
coberturas de terreno a partir de fotografías aéreas digitalizadas utilizando
para tal efecto las redes neuronales de aprendizaje supervisado y
no supervisado. Los métodos desarrollados en el
presente, se extienden fácilmente para el estudio de imágenes satelitales
multiespectrales.
El reconocimiento de patrones es aquella disciplina
científica cuyo objetivo es la clasificación de objetos en un número dado de
categorías o clases (Theodoridis & Koutroumbas, 1998). En el tipo de aplicación que nos
corresponde en este articulo, estos objetos a clasificar son porciones de
imágenes. Las imágenes provienen de fotografías aéreas tomadas de determinadas
regiones. En el caso presente son fotografías del Área de Manejo Integrado
Cota-Pata en el departamento de La Paz, Bolivia.
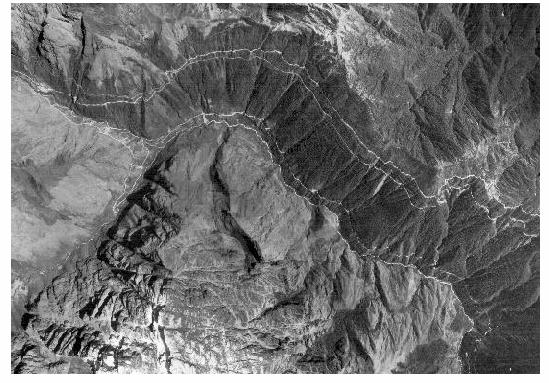
Figura 42. Fotografía aérea del parque Cota-Pata de Bolívia
Como se observa en la figura las diferentes
coberturas del terreno dan diferentes patrones de textura. La clasificación y
cuantificación de estos patrones a partir de las fotografías aéreas tiene
importancia en la construcción de mapas temáticos y se viene realizando hace
algunas décadas. Pero la década de los 80 y los 90 fueron especialmente
exigentes por la creciente necesidad del estudio de la Biodiversidad y con esto
la
creación de Parques Nacionales o Reservas que posean
una diversidad de ecosistemas y hábitats. Paralelamente, el desarrollo de la
tecnología computacional abarató los costos y fue posible preguntarse sobre la
factibilidad de incorporar a la máquina y sus potencialidades en los procesos
de clasificación de la cobertura del terreno, usando como insumos las
fotografías aéreas con el propósito de realizar mapas de la
cobertura y establecer pautas para la cuantificación
de la diversidad de las regiones con el fin de generar información útil para su
manejo sostenible.
2.-PAUTAS PARA
LA CONSTRUCCIÓN DEL SISTEMA DE CLASIFICACIÓN
La
computadora trabaja con imágenes digitales. Una imagen digital resulta de la discretización
de una imagen continua I(x,y).
La imagen continua puede ser la fotografía aérea, después del proceso de discretización se obtiene la imagen digital I(m,n), con
![]()
que se almacena en un arreglo
bidimensional de orden MxN. La intensidad de la
imagen es cuantificada en G niveles de gris. De esta manera cada elemento (m.n) puede tomar un valor entre 0, 1,
...., G-1. Es común que G = 2p ; donde p = 1,2,
3,...
El ojo humano
puede distinguir cerca de 16 niveles de gris pero la máquina generalmente
trabaja con G = 256. Aquí puede radicar la posibilidad de crear un sistema de
clasificación competitivo con el sistema de clasificación humano. Dentro el
arreglo bidimensional cada elemento ó pixel se representa de diferente forma.
Por ejemplo, puede ser un real de doble precisión (64 bits), ó un entero
positivo (8 bits). Para el tratamiento digital se emplean generalmente cuatro
tipos de imágenes:
1. Las imágenes
indexadas que consisten de dos arreglos, la matriz de la imagen y la matriz del
mapa de colores. Este último es un conjunto ordenado que permite codificar los
colores presentes en la imagen.
De esta
manera, el valor de un elemento en la matriz de la imagen denota a un código en
el mapa de colores. Este código contiene tres valores en
el sistema RGB, por eso, el mapa de colores no es más que un arreglo que en cada fila contiene
tres elementos que codifican un color en el sistema RGB, estos elementos
pertenecen al intervalo [0,1].
2. Las imágenes
de intensidad consisten de un solo arreglo bidimensional, cada elemento del
arreglo tiene un valor que cae dentro del intervalo [0,1] ó dentro del
intervalo [0,255] comúnmente el valor cero
representa el negro y el valor 255 el blanco.
3. Las imágenes
Binarias son estructuralmente muy parecidas a las imágenes de intensidad, la
diferencia radica en que los elementos de la imagen solo pueden tomar dos
valores, ceros o unos.
4. Las imágenes RGB se almacenan en un arreglo
tridimensional cuya la tercera dimensión sirve para almacenar la codificación RGB.
Existen muchos formatos comerciales para el almacenamiento de las
imágenes, entre estos: BMP, JPG, PCX, TIFF. En el presente artículo se
trabajará preferentemente con imágenes del tipo BMP que se almacenan en la
memoria como imágenes de intensidad. De
esta manera, la fotografía de una región se almacena en el computador como la
imagen base. De esta imagen se extraerán algunas porciones que representan los patrones a clasificar. En la
fig. 5.2 se muestra la imagen y algunas porciones que visualmente son
diferentes por pertenecer a diferentes clases de cobertura del terreno. La idea
radica en construir una Red Neuronal que permita clasificar estas porciones
(patrones) en forma automática dentro de un número dado de clases.
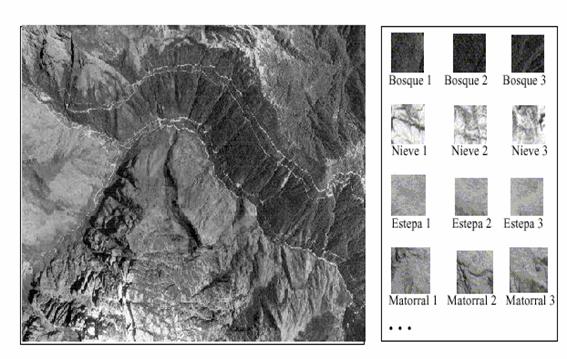 Figura
43. Diferentes coberturas del terreno
extraídas de la fotografía digital
Figura
43. Diferentes coberturas del terreno
extraídas de la fotografía digital
Para esto, es necesario encontrar unas características medibles que posibiliten la diferenciación de clases y que
compitan con la fácil diferenciación visual que se puede realizar. La máquina
es buena manejando números pero no así formas ni texturas. Supóngase que se han
encontrado l características
representadas por las variables xi, i = 1, 2, ....... l, agrupando estas variables se obtiene el
vector de
características.
x = [x1, x2, ....... , xl] T
De esta manera, cada clase quedará
asociada a unas variaciones aleatorias de este vector. Por
ejemplo, el patrón bosque estará asociado a variaciones del vector
x que contiene las características que
aún
permiten diferenciar el bosque de otras clases de cobertura del
terreno representadas en la fotografía
aérea.
Para el mejor desempeño de un sistema clasificador se hace
necesario añadir dos categorías a los tipos de
cobertura que queremos clasificar, estas son: C confusos, C
desconocidos. Estas dos categorías adicionales liberan al
sistema clasificador de dar respuestas
concluyentes cuando existe confusión y evitan la excesiva
generalización al clasificar una textura que no corresponde a una
cobertura de terreno.
Como se dijo antes, un examen visual de la fotografía aérea
permite notar que diferentes coberturas de terreno representan diferentes
texturas en la imagen. ¿Cómo se puede obtener características cuantitativas que
permitan diferenciar una textura de otra?. La
respuesta no es trivial, y depende fuertemente de las condiciones y
limitaciones de una aplicación concreta para la cual se diseña el sistema de
clasificación. Un principio orientador puede sugerir encontrar características
cuyos cálculos no consuman excesivos esfuerzos computacionales. Según (Theodoridis
& Koutroumas, 1998) el diseño completo de un
sistema de clasificación atraviesa
etapas que mostramos a continuación:
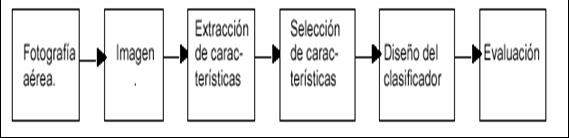 Figura 44. Estapas.
Figura 44. Estapas.
Uno de los principales problemas que se debe resolver en la
clasificación es la dimensión del vector de características. En una imagen, el
número de características puede ser tan grande como el número de pixeles (en un
patrón de 50 x 50 pixeles la dimensión del vector de
características sería 2500). Debido a esto, surge la necesidad de reducir esta
dimensionalidad, buscando por un lado la optimización del tiempo de cálculo y por otro lado evitando la
redundancia al tratar con características altamente correlacionadas.
Según Bishop (1995), el procedimiento
para la selección de características tiene dos componentes. Primero, se debe
tener claro un criterio que permita juzgar por qué un subconjunto de
características es mejor que otro subconjunto. Segundo, debe existir un
procedimiento sistemático para encontrar estos subconjuntos de características.
Una búsqueda ciega a partir de d-características necesitaría buscar en un
espacio con 2d elementos, lo cual es
impracticable para valores altos de d,
por ejemplo, si d=100. Si de alguna manera se decidió que se necesita
f d características. En este caso el
espacio de búsqueda tiene el número de
elementos igual a:

Que en general es más pequeño que d.
Son buenas
aquellas características que tienden a alargar la distancia entre clases y a
disminuir la distancia dentro de las
clases. O en otras palabras, la esperanza radica en encontrar características
que generen grandes variaciones entre clases y pequeñas variaciones dentro de
las clases. La fig. 5.4 muestra algunos posibles casos que pueden ocurrir con
la selección de características, lo ideal es encontrar características que
generen pequeñas distancias dentro de las clases y grandes distancias entre
clases.
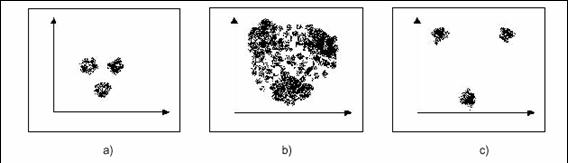
Figura 45.
Clasificación
de puntos en el espacio euclidiano: a) pequeña distancia entre las clases y
pequeña distancia dentro de las clases; b) mucha distancia dentro de las clases
y pequeña distancia entre las clases; y, c) Mucha distancia entre las clases y
poca distancia dentro de las clases.
Es bueno recalcar que una imagen del mundo real
tiene generalmente demasiada redundancia, fundamentalmente por que los objetos tienen una estructura estable que
permite reconocerlos a pesar de la presencia de ruido. Por eso, en una imagen,
afortunadamente, no es necesario elegir todos los pixeles como entrada a una
red neuronal pues existe demasiada redundancia en esta Información. Una forma
de eliminar la redundancia es realizar la Transformada de Fourier
y eliminar los componentes con energía débil. También pueden ser usadas otras
transformadas basadas en las de Fourier como la Transformación
Discreta de Wavelets. Sin embargo, el propósito del
presente trabajo es encontrar características que exijan un bajo consumo de
cálculo en comparación a lo exigido por estas transformaciones. Aún cuando, la
porción del patrón a reconocer sea pequeña, digamos 50x50, el número de pixeles presente será de
2500. Este número es muy grande para implementarlo en un sistema de
clasificación del cual se espera un buen desempeño en la generalización. Por lo
tanto, en el presente trabajo se recurrió al uso de la textura como una
propiedad diferenciadora de las clases de cobertura
de terreno presentes en la fotografía aérea. La textura de un patrón está
caracterizada por la forma en que están
distribuidos espacialmente los pixeles con sus diferentes niveles de gris.
Aunque esta definición no es muy formal, es conceptualmente suficiente como
para buscar características cuantitativas sobre la base de explotar las
relaciones de los pixeles dentro del patrón.
Junto con las transformaciones arriba mencionadas se
pueden usar características que surgen del tratamiento estadístico de la
distribución de pixeles dentro del patrón. De estas se usan principalmente las
siguientes (Theodoridis & Koutroumbas,
1998).


Aunque, existen diversos
métodos para la selección de características, que pueden estar basados en
criterios estadísticos, en el presente trabajo se usa el conocimiento
heurístico basado, por ejemplo, en el hecho de que las características deberían
ser invariantes a la rotación porque un bosque sigue siendo un bosque
independiente del punto de vista del observador. En general la textura no
cambia a la rotación, y es la textura el patrón que precisamente se pretende
clasificar. Entre las características seleccionadas se pueden
indicar:
1. El valor medio de la
intensidad del patrón
2. La dispersión.
3. El número de cambios de la
intensidad por filas.
4. El número de cambios de la
intensidad por columnas.
En la implementación del
trabajo se creyó conveniente complementar las anteriores características con
una selección al azar de algunos pixeles del patrón. Una vez que las
características han sido seleccionadas, estas pueden tener un rango diverso de
valores. Para la mayoría de las aplicaciones es conveniente transformar los
datos de modo que el proceso de cálculo mantenga propiedades de estabilidad. En
el caso más sencillo, estas
transformaciones son
lineales respecto a los datos de entrada, y a veces también a los de salida. A
este proceso se le llama Normalización.
Si se tienen N datos disponibles para las
características xk, podemos calcular la normalización
como:
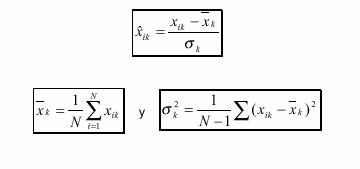
CLASIFICACIÓN SUPERVISADA
En esta clasificación, todo el diseño se basa
en la existencia de un conjunto de datos de
entrenamiento que a priori
están clasificados. Y el sistema en consecuencia explota este conocimiento.
En el presente trabajo el
método supervisado parte de un cierto conocimiento previo del terreno,
adquirido por experiencia previa o por trabajos de campo.
La Red de retropropagación.
En 1986, Rumelhart,
Hinton y Williams, basados
en otros trabajos formalizaron un método para que una red neuronal aprendiera
la asociación que existe entre los patrones de entrada a la misma y las clases
correspondientes, utilizando más niveles de neuronas que los que utilizó Rosenblatt para desarrollar el Perceptrón (Hilera et
al., 1995). Este método conocido como retropropagación
(Backpropagation), está basado en la generalización
de la regla delta y a pesar de sus propias limitaciones, ha ampliado de forma
considerable el rango de aplicaciones de las redes neuronales.
Los algoritmos de
clasificación estadística son los más comunes para las técnicas de
teledetección y generalmente están ampliamente tratados en varios libros. Estos
métodos de clasificación son referidos como clasificadores específicos de pixel
o punto (Richards, 1995) en el que se etiqueta un
pixel sin tomar en cuenta de cómo están etiquetados los pixeles vecinos. Este
conocimiento de la relación existente entre pixeles
vecinos es una rica fuente
de información que no es explotada en un clasificador simple y tradicional. Se
considerará la importancia del contexto espacial que genera la textura y se
mostrarán los beneficios de tomarla en cuenta cuando se realicen decisiones de
clasificación.
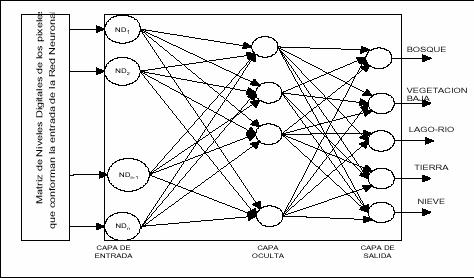
Figura 46.
![]()
Arquitectura de la Red
La arquitectura de la red neuronal artificial
es de conexiones hacia delante y multicapa con función de activación sigmoidal. El modelo de la red estará conformada por una
capa de entrada, una capa oculta y una capa de salida con M neuronas
correspondientes a las categorías definidas como: Bosque, Vegetación baja, Lago
- Río, Tierra y Nieve, como se muestra en la figura.
Fase de entrenamiento
Para comenzar el proceso de
entrenamiento, es necesario realizar una identificación de las categorías a
clasificar. Luego de identificar las áreas, se procede al proceso de enseñanza
de la red. El funcionamiento es el siguiente:

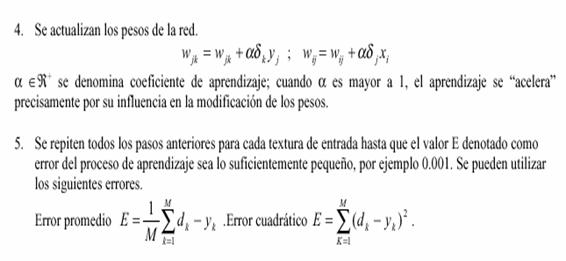
Para el proceso de entrenamiento se crea un archivo
que contiene los parámetros de entrada y la salida deseada de la red. Se
realiza una lectura del archivo y se ejecuta el aprendizaje hasta que el error
de la red sea aceptable. Este proceso está incluido dentro del sistema de
clasificación NAIRA (se recomienda realizar los experimentos necesarios con el
programa propuesto).
Fase de clasificación o reconocimiento
Cuando el proceso de entrenamiento de la red termina
aceptablemente para cada patrón deseado, se puede realizar una fase de
clasificación "mostrando" a la red las categorías que se desea que
reconozca. Estos patrones pueden ser los
que se utilizaron durante el proceso de enseñanza o nuevos que la red nunca
antes había visto. Esto es una de las características más frecuentes de las
redes neuronales: la generalización.
Durante las pruebas experimentales, se pudo
evidenciar que si una red deja de aprender antes de llegar a una solución
aceptable, se debe realizar un cambio en el número de neuronas ocultas, el
sesgo del modelo (c), el coeficiente de aprendizaje (), o simplemente, volver a
empezar el entrenamiento con un conjunto distinto de pesos.
El programa
NAIRA puede ser obtenido
de http:
//otilio.dcs.fi.uva.es/airene/Software/bp/En la figura se muestra una de las pantallas del
programa que despliega el resultado de la clasificación de una porción de la
fotografía aérea.

Figura 47.
![]()
CONCLUSIONES
Se ha
demostrado que se puede aplicar un modelo de red neuronal artificial para el
reconocimiento de patrones en fotografías aéreas, aportando de esta manera con
una nueva herramienta para realizar fotointerpretación y su posterior
tratamiento. También se ha demostrado que para realizar una clasificación, no
se puede ignorar la "vecindad" o el contexto alrededor de un pixel,
es decir, un solo elemento no brinda toda la información acerca de una
categoría.
Una
característica frecuente de las redes neuronales de conexiones hacia delante que utilizan retropropagación, es la generalización. Se pudo comprobar
durante las pruebas experimentales la aparición de esta característica sobre
información que no habían ingresado durante la etapa de entrenamiento, pero fue
solucionada utilizando un valor umbral subjetivo. Es decir, debido a que la
función de activación brinda una salida entre 0 y 1 para algún patrón, en la
fase de reconocimiento, para alguna información de entrada se calculan las
salidas yk , sólo si existe una única salida que sea
mayor o igual al umbral sugerido se considera como un reconocimiento aceptable,
si existe mas de una salida con valor mayor o igual al umbral, se tienen
salidas o clases parecidas o confusas y, si todas las salidas no superan este
umbral se tiene el caso de patrón desconocido.
El modelo de
RNTF planteado demuestra robustez en el estudio del reconocimiento de patrones,
la teoría que propone no se considera la panacea pero muestra resultados que
son alentadores en el diseño de cerebros artificiales o modelos de redes
neuronales más naturales. El ejemplo probado en este trabajo se puede extender
para desarrollar la percepción de robots mediante visión para la actuación en entornos
dinámicos.
RECOMENDACIONES
Como recomendaciones se sugieren las siguientes:
1.
Dependiendo del tipo de aplicación, una matriz de 15x15 pixeles (225
neuronas) para el trabajo, es suficiente para realizar un reconocimiento de
categorías. Si se desea realizar un "buscador" de patrones,se puede disminuir hasta 10x10 pixeles dependiendo
al patrón de búsqueda.
2. Si bien las redes neuronales cumplen muy bien
su trabajo y tienen una amplia gama de aplicaciones sobre varios dominios,
tienen algunas limitaciones. Por ello han aparecido recientemente distintas
extensiones de estos modelos, como por ejemplo, las redes de alto orden, las
redes neuronales probabilísticas, las
redes neuronales difusas y las redes neuronales basadas en "Wavelets" y
redes funcionales [Castillo et al. 1999].
3.Realizar un análisis multiespectral
sobre imágenes satelitales, tomando en cuenta el contexto (no un clasificador
específico de pixel o punto). Esto incrementa la cantidad de información de entrada muy necesaria para
realizar una discriminación entre patrones.
Aguilar, R.
"Red Neuronal de Topología Flexible". En: VI Congreso Nacional de Ciencias de la
Computación, La Paz, Bolivia. Septiembre de 1999.
Bishop,
C. M. “Neuronal Networks for Pattern
Recognition”, Clarendon Press,
Michell. Capitulo 4: Artificial Neural Networks.
Gonzales
Woods. “Tratamiento Digital de Imágenes”.
B. Martín del Brío, A. Sanz Molina. “Redes Neuronales y Sistemas Borrosos”, RA-MA,
1997.
James A. Freeman, David
M. Skapura. “Redes
Neuronales. Algoritmos, aplicaciones y técnicas de programación”. ADDISON-WESLEY/DIAZ DE SANTOS, 1993
[Haykin-94]
Haykin, S. “Neural Networks: A Comprehensive
Foundation”. Macmillan, 1994.
https://www.gc.ssr.upm.es/inves/neural/ann2/